Create your CubeMars account

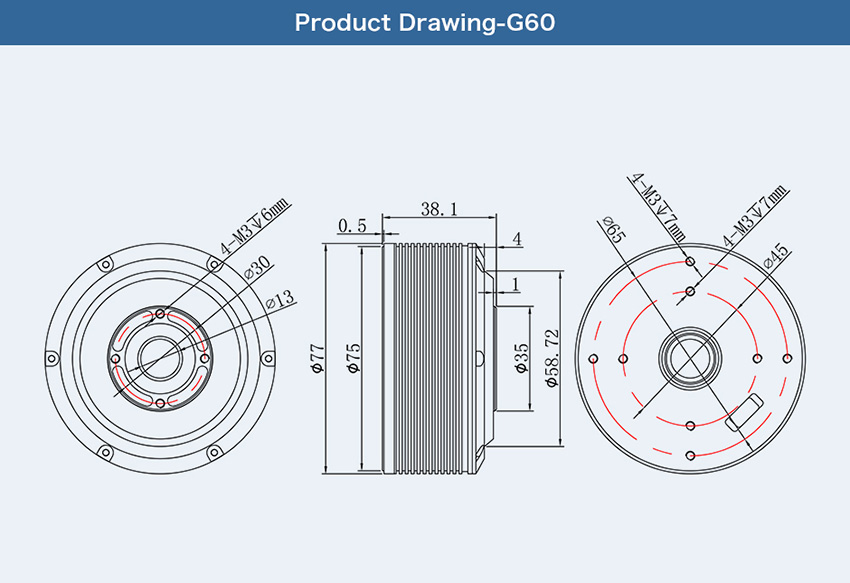
The Innerunning gimbal motor G60 adopts a large hollow shaft design, which can be integrated with an electric slip ring for easy to cross the cables. The overall structure is light and better integration, low rotary inertia, easy to achieve fast response.
Cubemars has developed a Standard version and an upgraded version to solve customer needs in all aspects. Customers who need a gimbal motor can match it according your needs.
Standard version: no driver board, controlled by PWM
Upgraded version: with driver + magnetic encoder, controlled by CAN
The inrunning gimbal motor G60 has integrated with encoder and driver, which are combined into one, and an absolute encoder is used for precise control, with an accuracy as high as 0.01°. At the same time, it supports speed loop and position loop control modes to achieve precise control and improve feedback response speed .
G60 adopts high performance winding, low speed operation, high torque density, to meet the needs of large power. At present, the main application fields are other high-precision and low-speed applications such as gimbal systems and autonomous.