Create your CubeMars account

In our previous installment, we systematically explored the logic behind selecting humanoid robot motors for the shoulder, elbow, and wrist joints of humanoid robot upper limbs, and received a great deal of feedback from the industry.
Two questions were frequently raised during the discussions:
1. How does the selection for the lower limbs (knee and hip) differ from that for the upper limbs?
2. When dealing with "load-bearing + dynamic movement," how do we balance torque, responsiveness, and reliability?
The core conclusion is clear: lower-limb humanoid robot motor selection is not simply a scaled-up version of the upper-limb approach.
From a functional perspective:
Hip joint motors: Bear the torso load and deliver primary gait torque, serving as the power core of the entire robot.
Knee joint motors: Switch rapidly between support and swing phases, placing greater emphasis on response speed and impact absorption.
At the same time, the lower limbs are more sensitive to heat dissipation, brake safety, and mass distribution.
Applying the upper limb logic directly often results in:
Sufficient torque, but unstable gait
Strong power, but rapid overheating
Against the backdrop of rapid advancements in humanoid robotics, the selection of humanoid robot joint actuator has become one of the key factors determining overall robot performance. In particular, lower limb humanoid robot motors not only bear the main load but also directly affect walking stability, explosive power, and energy efficiency.
The complete power system that drives the robot's leg movements
Lower limb for humanoid robots actuators are specialized actuators designed specifically for the lower limb joints (hip, knee, ankle) . As a core branch of humanoid robot joint motors, they differ from industrial servos in their high power density, lightweight construction, high overload capacity, and high dynamic response, making them the key power source for achieving bipedal locomotion.
If we compare the robot to the human body, lower limb actuators are equivalent to the thigh and calf muscles—they not only provide strength but also precisely control the force, speed, and angle of every movement.
In humanoid robots, lower limb motors perform three key tasks:
| Task | Description | Human Analogy |
| Supporting Body Weight | Continuously output high torque to support the robot's upper body and load | Quadriceps, gluteus maximus |
| Driving Movement | Provide the instantaneous explosive power needed for walking, running, and jumping | Gastrocnemius, hamstrings |
| Absorbing Impact | Absorb ground reaction forces during landing to protect the mechanical structure | Knee cartilage, meniscus |
A humanoid robot lower-limb joint actuator is not a single motor, but a highly integrated robot joint actuator.
1. Power Source: Motor Body – Provides raw torque and speed, determining power density and overload capacity.
2. Reduction Mechanism – Amplifies torque and matches speed, ensuring joint output torque and rigidity.
3. Sensing System – Eliminates transmission backlash and improves position/torque accuracy.
4. Braking and Safety Module – Provides static holding torque, enhancing safety during human-robot interaction and unexpected conditions.
5. Drive Control Unit – Handles FOC vector control, overload protection, temperature rise protection, and communication.
6. Structural Integration Components – Achieve lightweight, compact design, and IP protection, adapting to lower limb space constraints.
The hip joint bears the robot's weight, lifts and rotates the leg, provides explosive power for running and jumping, and absorbs landing impact. Hip joint motors for humanoid robots must meet the following:
High torque output with 3–5× overload capacity
High power density with lightweight design
Strong impact resistance and dynamic response speed
Integrated structure suitable for rotational joints
The knee joint primarily performs flexion and extension, withstanding ground reaction forces. Knee joint motors for humanoid robots focus on:
Continuous torque and thermal stability
Axially compact structure to fit within the leg space
High rigidity and transmission efficiency
Compatibility with both rotational and linear drive solutions
As one of the most critical humanoid robot motors in the lower limbs, the humanoid robot hip joint motor supports the entire robot's weight, enables multi-axis rotation, provides explosive power for running and jumping, and absorbs landing impact. Its selection revolves around high torque, high overload capacity, lightweight design, and high integration, with flexible matching based on the robot's positioning (high-end R&D, mass production, or low-cost validation).
I. Core Operating Conditions and Selection Requirements for Hip Joint Motors
The hip joint is the most heavily loaded and dynamically complex joint in the lower limbs, combining static load-bearing with dynamic burst characteristics. Its motion includes multi-axis rotation (flexion/extension and abduction/adduction) with a range of up to ±90°, directly determining the robot's walking stability, running/jumping capability, and endurance. Based on general operating conditions in medical prosthetics and humanoid robots, The hip joint motor selection must meet six core requirements—these also formed the basis for the Nepalese student team's selection of CubeMars motors.
1. High Torque + High Overload Capacity: Support a total robot weight of 50–80 kg. Rated torque must cover continuous walking, while peak torque must accommodate squatting, jumping, and landing impact (3–5× rated overload). The motor must also provide medical-grade reliable load-bearing capacity.
2. High Power Density + Lightweight: Reduce lower limb self-weight to avoid affecting gait balance due to proximal loading. Aim for torque density >15 N·m/kg, with compact installation space in the hip
3. Precise Control + Fast Response: Support high-precision torque/position dual-mode control with a response bandwidth ≥100 Hz, adapting to real-time posture adjustments on complex terrain (e.g., natural gait simulation for prosthetics, landing buffering for robots).
4. High Integration + Easy Adaptation: Prioritize integrated actuators (motor + reducer + encoder + driver) to reduce external components and integration complexity, improving system integration efficiency and overall reliability, facilitating rapid engineering implementation.
5. Reliability + Impact Resistance: Pass rigorous load and back-drivability tests to meet long-duration continuous operation requirements, while withstanding landing impact and mechanical friction to achieve medical/industrial-grade standards.
6. Flexible Cost Adaptation: High-end R&D models pursue extreme performance; mass production/low-cost validation models can select cost-effective modules that maintain core performance while balancing performance and cost.
II. Preferred Types of Hip Joint Motors
Based on hip joint operating conditions and CubeMars AK Series Robotic Actuators, current hip joint motors for humanoid robots can be categorized into high-end core solutions and low-cost validation solutions. Both types are centered around CubeMars AK series actuators (e.g., AK70, AK80, AK60) , with differences mainly reflected in parameter matching and specific model selection. The Nepalese student team's application based on the AK60-6 V1.1 also provides an important reference for motor selection in low-cost scenarios.
1. High-Torque CubeMars AK Series Actuators – Preferred for High-End Humanoid Robots
Core Advantages: Extremely high power density, hollow structure, dual encoders for precise control. When integrated with planetary/cycloidal reducers, they deliver high torque, low backlash, and high dynamics, suitable for multi-axis drive requirements of high-end bipedal robot hip joints.
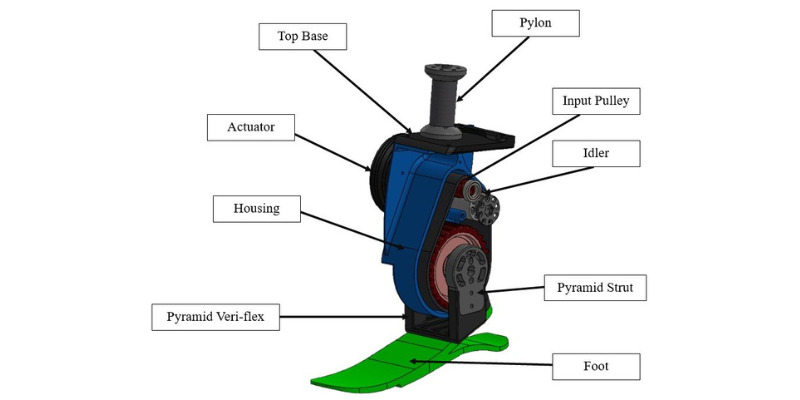
Engineering Adaptation: The CubeMars AK10-9 V3.0 KV60 robotic actuator is a representative model, with a rated torque of 18 N·m, peak torque of 53 N·m, and maximum torque density of 86 N·m/kg. It supports both servo/MIT torque dual modes, making it ideal for the high-load, high-dynamic requirements of 50–80 kg humanoid robot hip joints. It was also the selected solution for the StaccaToe monopod robot's hip joint.
Selection Tips: Prioritize flat outer-rotor structures for more stable torque output; inner-rotor structures are better suited for lightweight models with higher dynamic response requirements. Achieve a balance between torque output and dynamic response by properly matching the reduction mechanism.
2. Medium-Torque High-Cost-Effectiveness Integrated Actuators – Preferred for Low-Cost Validation / Lightweight Models
Core Advantages: Compact size, light weight, and cost control, while retaining the core features of integrated design and precise control. Suitable for low-cost prototypes, lightweight humanoid robots, medical rehabilitation prosthetics, and similar applications where extreme peak torque is not required, with a focus on torque density and reliability.
Engineering Adaptation: The Nepalese student team's development of a low-cost prosthetic using the CubeMars AK60-6 V1.1 validates the suitability of this type of motor for hip-like load scenarios. Although the AK60-6 V1.1 is primarily selected for ankle joints/prosthetics, it offers 3 N·m rated torque, 9 N·m peak torque, and a lightweight 368 g design, achieving high torque output and precise position control. It accurately simulates human gait and has passed rigorous load and back-drivability tests, meeting high reliability requirements.
Selection Tips: Prioritize modules that support 24 V universal voltage and CAN/UART simple communication for compatibility with low-cost power and control systems. A reduction ratio of around 6:1 is preferred to meet the torque requirements of lightweight loads.
III. Selection Solutions for Humanoid Hip Joint Motors by Positioning
Based on robot weight, positioning, and cost budget, hip joint motor selection can be divided into three categories, all referencing CubeMars AK series actuators. The Nepalese student team's AK60-6 V1.1 provides a proven template for low-cost validation, achieving "performance meets requirements with controllable cost":
1. High-End R&D Models (50–80 kg, Pursuing Extreme Performance)
Motor Model: CubeMars AK10-9 V3.0 KV60
Core Advantages: High torque density, 53 N·m peak torque, dual encoders for precise control, impact-resistant bearings, suitable for high-dynamic movements like running, jumping, and complex terrain.
Reducer Matching: Built-in 9:1 planetary reducer.
Applicable Scenarios: University research, high-end biomimetic robot development.
2. Mass Production Models (30–50 kg, Balancing Performance and Cost)
Motor Model: CubeMars AK80-9 V3.0 KV100
Core Advantages: 22 N·m peak torque, one-click intelligent parameter identification, seamless switching between servo/MIT dual modes, approximately 20% lower cost than the AK10-9 KV60, mature supply chain.
Reducer Matching: Built-in 9:1 planetary reducer with 0.1° backlash, ensuring smooth motion.
Applicable Scenarios: Industrial humanoid robots, commercial service robots.
3. Low-Cost Validation / Lightweight Models (10–30 kg, Cost Priority)
Motor Model: CubeMars AK60-6 V1.1
Core Advantages: 368 g lightweight, 3 N·m rated torque, high reliability, cost only RMB 1,499–1,999.
Reducer Matching: Built-in 6:1 planetary reducer.
Applicable Scenarios: Student capstone projects, prototype validation, lightweight humanoid robots, medical rehabilitation prosthetics (referencing the Nepalese student team's solution).
IV. Selection Summary and Key Case Insights
1. Core Principles for Hip Joint Motor Selection
The core of hip joint motor selection for humanoid robots is "torque matching, lightweight as the guideline, integration priority, and flexible cost adaptation" : high-end models pursue high torque, high overload, and high dynamics; low-cost models prioritize high-cost-effectiveness integrated modules while ensuring core torque and reliability, avoiding blind pursuit of high parameter redundancy and cost waste.
2. Key Engineering Insights from Two Cases
AK60-6 V1.1 Low-Cost Prosthetic Case: Validates the suitability of medium-torque high-cost-effectiveness modules for lightweight hip joint scenarios. Motor selection need not be "parameter-centric"; it should match actual load requirements. The AK60-6 V1.1 with 3 N·m rated torque is perfectly suitable for lightweight robots weighing 10–30 kg.
AK10-9 KV60 High-End Robot Case: Demonstrates that integrated joint actuators are the optimal solution for high-end hip joints. Features such as high torque density, dual encoders, and impact-resistant bearings are essential for achieving high-dynamic, highly reliable motion, representing the current mainstream industry trend.
3. Key Pitfalls to Avoid
Avoid selecting high-end, high-torque motors for lightweight models: This leads to doubled weight and cost, while creating performance redundancy.
Avoid selecting non-integrated motors for low-cost scenarios: Non-integrated motors require additional integration of reducers and encoders, increasing machining and debugging costs, making them less cost-effective than integrated modules.
Avoid ignoring medical/industrial-grade reliability: Hip joint motors operate continuously over long periods and must pass load, back-drivability, and temperature rise tests to meet long-duration usage requirements.
Avoid excessively high reducer reduction ratios: Excessively high reduction ratios significantly reduce joint response speed, affecting overall dynamic performance. The hip joint motor reduction ratio should be kept within a moderate range, balancing output torque with response speed. Lightweight models are better served with lower reduction ratios to achieve better dynamic performance and control sensitivity.
The knee joint motor is the title of the humanoid robot's lower limbs, transmitting power from the hip joint, withstanding ground reaction forces, and supporting key actions such as squatting, stair climbing, and landing buffering. Motor selection must consider torque output, structural compactness, rigidity and compliance balance, thermal stability, and must be deeply aligned with the overall robot dynamics and reducer solution.
I. Core Operating Conditions and Selection Requirements for Humanoid Robot Knee Joint Motors
The knee joint's motion is primarily single-axis flexion-extension (range 0–135°), without the multi-axis rotation required by the hip joint. However, it directly bears the vertical load of the robot's full weight and landing impact, making it the site of the most direct force transmission and most pronounced heat accumulation among the lower limb joints. This defines the core requirements for motor selection, which also served as the basis for the StaccaToe robot's knee joint motor selection:
1. Medium-High Torque + Precise Overload Capacity: Rated torque must cover continuous walking and standing; peak torque must accommodate squatting and landing impact (2–4× rated is sufficient—avoid the 3–5× overload required for the hip to prevent unnecessary weight increase from motor redundancy).
2. Axial Compactness + Lightweight: The knee joint connects the lower leg and thigh, with limited installation space. Motors must have short axial length and small outer diameter, with controlled weight to avoid affecting gait balance due to excessive distal limb loading.
3. High Rigidity + Low Backlash: Ensures smooth flexion-extension motion, reduces position errors caused by transmission backlash, and accommodates rapid force feedback during landing buffering.
4. Good Heat Dissipation + Long-Term Stability: Knee joint motors operate continuously for extended periods (during walking, climbing), making them prone to heat accumulation. They require excellent heat dissipation and temperature rise control.
5. Compliant Control + Impact Resistance: Must withstand instantaneous impact from ground reaction forces during landing. The motor should support high-precision torque control, working with the control system to achieve buffering, while its mechanical structure must offer certain impact resistance.
6. Integrated Design: To fit within the compact lower limb space, prioritize integrated actuators to reduce cabling and external components, lowering integration complexity.
II. Standardized Selection Process for Humanoid Knee Joint Motors
Drawing on the engineering practice of the StaccaToe robot, knee joint motor selection is not a single-parameter screening but a full-process implementation from operating condition simulation to system validation, comprising 5 steps that balance theory and practice and can be directly applied:
1. Dynamic Simulation and Load Analysis: Use Adams/MuJoCo to build a lower limb model of the robot. Extract torque, speed, and power profiles for all operating conditions (walking, squatting, landing, stair climbing). Determine the knee joint's rated load, peak load, and continuous operation time. This is the foundation of selection (StaccaToe focused on simulating impact torque during jumping landings and heat accumulation requirements for continuous walking).
2. Determine Motor Type and Drive Solution: Based on robot positioning (high-end R&D/mass production entry-level, rotary drive), consider selecting CubeMars AK series integrated joint actuators (e.g., AK80-9 KV100) .
3. Core Parameter Screening and Verification: Screen candidate motors based on torque, speed, dimensions, weight, backlash, etc. Focus on verifying axial length, torque density, and thermal stability. Calculate system output torque using formulas, leaving a 1.2–1.5× safety margin.
4. Reducer Matching and Integration Design: If using a non-integrated motor, determine the reducer type and reduction ratio, and complete the structural integration design of motor + reducer. If using an integrated module, directly verify the compatibility of the module's reduction ratio with dynamic requirements, while designing cable management and mounting structures.
5. Prototype Testing and Performance Validation: After building the prototype, complete three core tests: temperature rise test (continuous operation for 2+ hours), overload test (sustained peak torque for 3–5 seconds), and dynamic response test (torque feedback during landing buffering) . StaccaToe, for example, used a FUTEK TRS-300 torque sensor to measure the torque characteristics of the AK80-9 V3.0 KV100, ensuring alignment with simulation results, and also tested motor temperature rise after continuous jumping to confirm stability.
III. Selection Summary and Key Case Insights
1. Core Principles for Knee Joint Motor Selection
Unlike the hip joint motor selection logic of "high torque, high overload, multi-axis adaptation," the core for knee joints is "compactness as the guideline, torque matching, rigidity priority, heat dissipation as a supplement." Avoid blindly pursuing high parameter redundancy, which can lead to excessive weight and size, affecting lower limb gait balance. Prioritize low backlash, high rigidity, and thermal stability to achieve precise, smooth flexion-extension drive.
2. Three Key Engineering Insights from the StaccaToe Case
Integration is the trend for knee joint selection: The successful application of the CubeMars AK80-9 V3.0 KV100 integrated module in StaccaToe validates that integrated modules significantly reduce knee joint integration complexity and enhance system reliability, making them the mainstream choice for future humanoid robot knee joints.
Parameter matching must align with overall robot load: Monopod/lightweight robots can appropriately reduce rated torque, focusing on torque density and compactness (e.g., the AK80-9 V3.0 KV100's 9 N·m rated torque suits StaccaToe). Heavy-duty robots require higher rated torque and rigidity while ensuring heat dissipation to avoid heat accumulation.
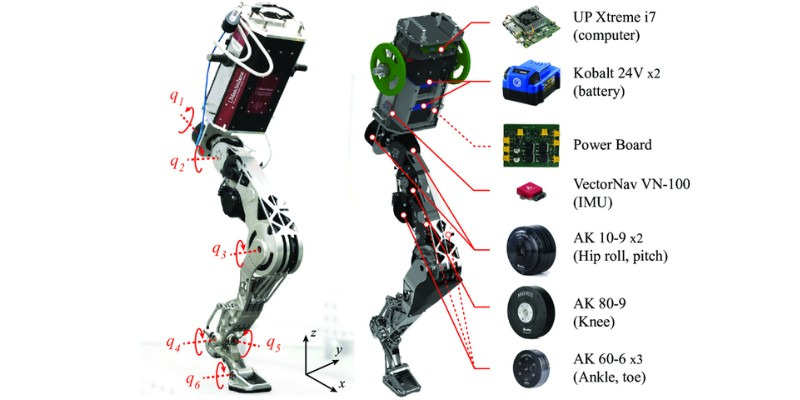
Motor selection requires deep synergy with the overall robot system: Motor selection cannot be performed in isolation; it must match the robot's power system (e.g., StaccaToe's 24V×2 series battery), control system, and structural rigidity. Synergy among these three is essential for achieving optimal performance; a single excellent motor parameter does not determine the final performance of the knee joint.
3. Key Pitfalls to Avoid
Avoid directly copying hip joint motor parameters: The 3–5× overload capacity required for hips is unnecessary for knees and leads to excessive motor weight and size, increasing distal limb loading.
Avoid neglecting axial length: Slightly larger outer diameter may be acceptable, but excessive axial length directly prevents knee joint installation or causes interference with thigh/lower leg structures.
Avoid ignoring thermal stability: Knee joint motors operate continuously for extended periods. Focusing only on torque while neglecting heat dissipation can lead to overheating, triggering protection mechanisms and affecting robot endurance and motion stability.
Avoid underestimating backlash: Excessive backlash results in "play" during knee flexion-extension, delaying force feedback during landing buffering and affecting robot balance.
First, the core of selecting joint motors for humanoid robots lies in matching real-world operating conditions. Whether for the hip joint motor or knee joint motor, the process must revolve around load, motion characteristics, and dynamic impact. While meeting basic torque requirements, an appropriate safety margin should be reserved to avoid underperformance or excessive redundancy.
Second, the selection logic for hip and knee joints differs significantly. The hip joint motor emphasizes high torque, high overload capacity, and multi-axis dynamic capability, serving as the power core of the robot. The knee joint, in contrast, focuses more on structural compactness, high rigidity, and thermal stability, aiming to achieve smooth flexion-extension and effective impact buffering.
Third, motor selection should not be performed in isolation but rather as a coordinated effort with the reducer, control system, and overall robot structure. Integrated actuators (motor + reducer + sensors + driver) have become the mainstream solution, significantly reducing integration complexity while enhancing system stability and reliability.
Fourth, as evidenced by real-world cases (such as the low-cost prosthetic and monopod robot applications), the key to motor selection is not blindly pursuing high parameters, but rather appropriately matching based on robot weight and application scenarios, achieving the optimal balance of performance, weight, and cost. This is particularly important for the commercialization of humanoid robots.
Fifth, overall, the development trend for humanoid robot joint motors is moving toward high torque density, lightweight construction, high integration, and high dynamic response. Only by finding the balance among "performance matching + system synergy + cost control" can we truly achieve stable, efficient, and commercially viable humanoid robot locomotion capabilities.

