Create your CubeMars account

Bipedal robots have garnered significant attention in current robotics technology due to their ability to navigate complex environments with agility. As technological advancements continue, researchers are dedicated to developing bipedal robots that can efficiently synchronize with human operators, particularly in applications related to emergencies caused by natural disasters or human-made hazards.
Despite notable progress in artificial intelligence, existing bipedal robots still struggle to match human capabilities in motion control and flexibility. To enhance the performance of robots in complex and uncertain environments, a research team proposed a teleoperation system based on bilateral feedback. This system aims to map the human operator's motor intelligence in real-time to the robot, enabling the robot to mimic the operator's gait, jumps, and other dynamic actions.
In this project, researchers adopted a whole-body teleoperation approach, allowing operators to interact with the robot through wearable devices. The operator's movements are captured by sensors and converted into commands understandable by the robot. To ensure the robot can perform tasks efficiently, the research team designed a bilateral feedback mechanism consisting of two main components:
The operator's movement data is scaled in real-time to fit the robot's required proportions, ensuring that the robot can appropriately respond to the operator's actions.
While the robot executes movements, feedback forces are provided to help the operator perceive the synchronization level between the robot and their own motions. This enables the operator to adjust based on the robot's speed and status, facilitating smoother collaboration.
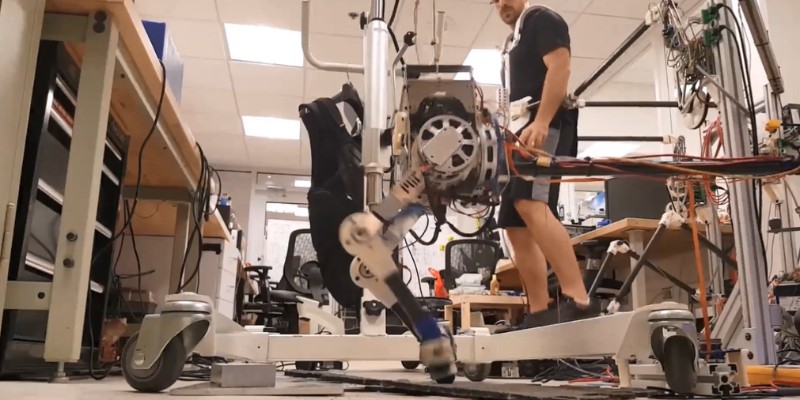
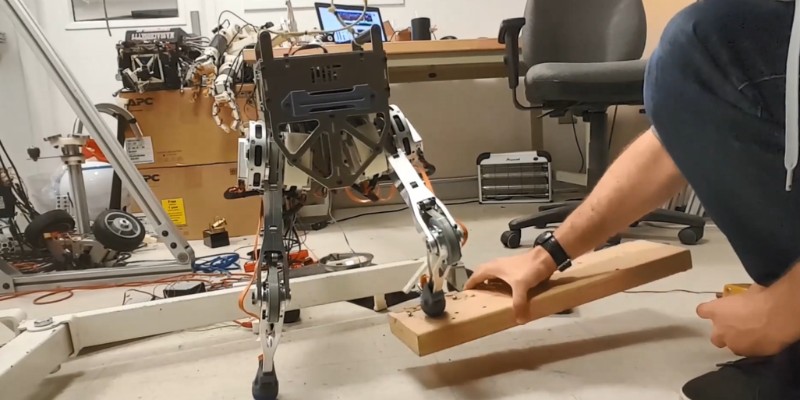
During the experimental phase, the robot successfully performed various dynamic actions, including walking, stepping in place, and consecutive jumps. The research team also demonstrated how the robot, under the operator's control, could maintain dynamic balance and adapt to external disturbances. These experiments not only validated the effectiveness of the bilateral feedback mechanism but also provided crucial support for the robot's stability in real-world applications.
This research highlights the potential of combining human motor intelligence with robotic control, offering new insights for enhancing bipedal robots' capabilities in practical applications. By leveraging this approach, robots can better adapt to complex environments, particularly in emergencies, providing effective support to first responders.
Looking ahead, the research team plans to further optimize control algorithms to improve the robot's flexibility and response speed, enabling it to tackle more complex tasks. This project not only advances the development of bipedal robot technology but also lays the groundwork for closer collaboration between humans and robots.