Create your CubeMars account

When evaluating a robot dog(quadruped robot), its gait pattern is only part of the story. The true challenge lies in its ability to adapt to uneven terrain and maintain dynamic stability in real time.
Recently, 15-year-old engineering enthusiast Arsenii Mironov built his own robot dog and conducted a remarkable balance test. He placed the robot on a tiltable wooden board, gradually lifting one side to create a slope. Despite the shifting incline, the robot maintained a steady stance — no slipping, no tipping over, just solid stability.
This test wasn't just about hardware — it was a stress test for control algorithms and robot actuators. Every slight movement required:
Fast torque response
Precise position adjustment
Smooth, controllable output
Without these, even the best control strategies wouldn’t be enough to keep the robot balanced.
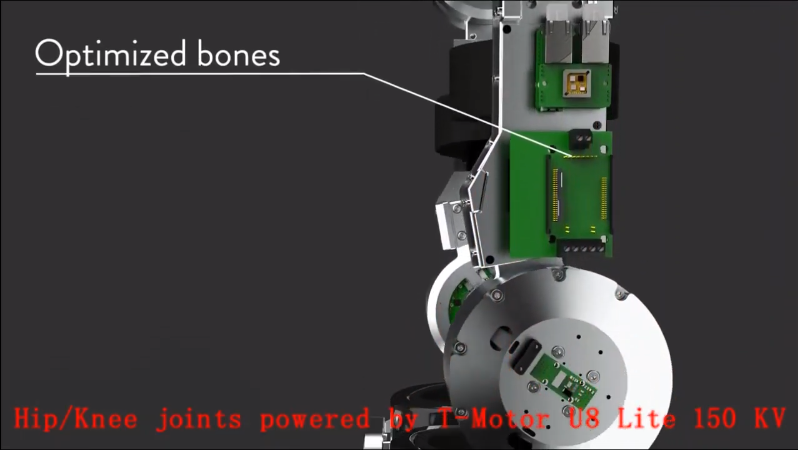
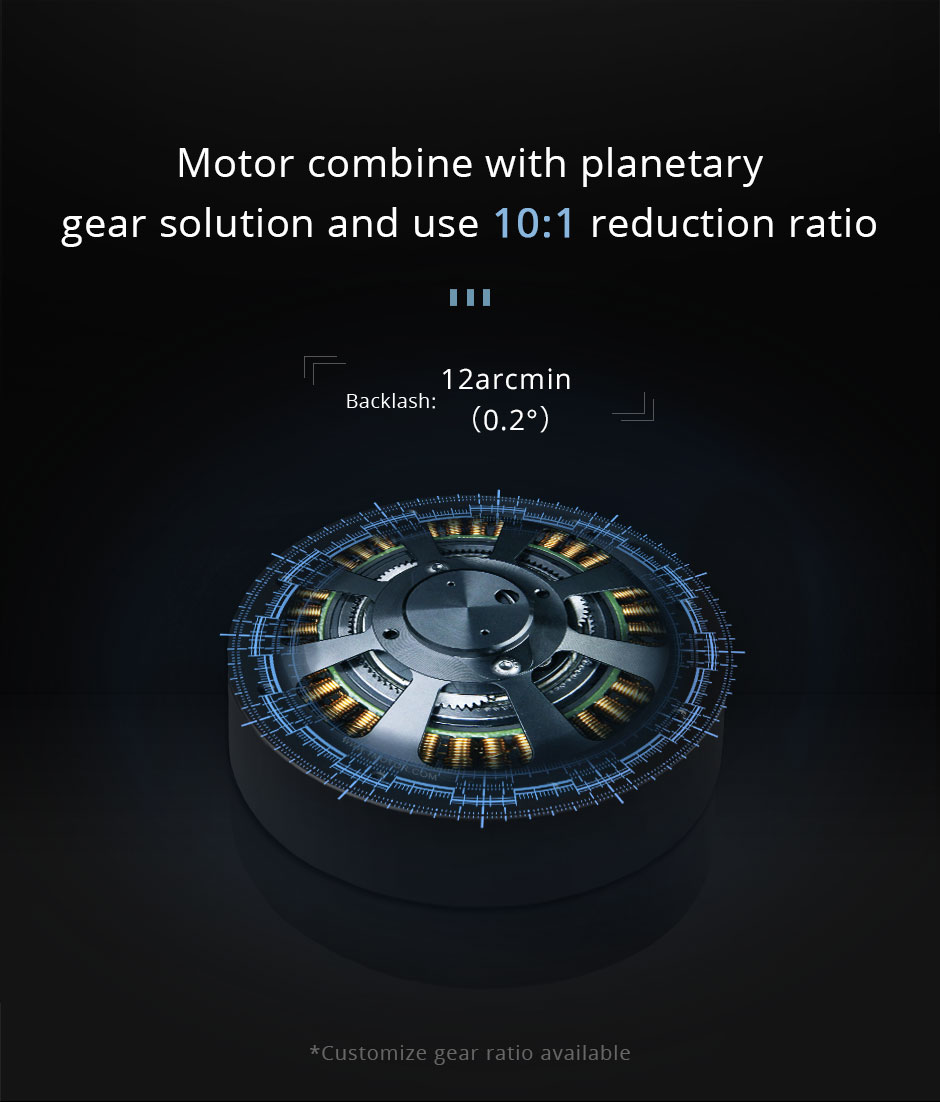
To power his robot dog’s 12 joints, Arsenii selected the CubeMars AK70-10 KV100 Robotic Actuator - 24/48V, 10:1 Ratio, known for its performance in demanding applications:
High Torque Density: Peak torque of 24.8 Nm to handle dynamic loads.
Ultra-Fast Response: Low latency for precise, high-frequency adjustments.
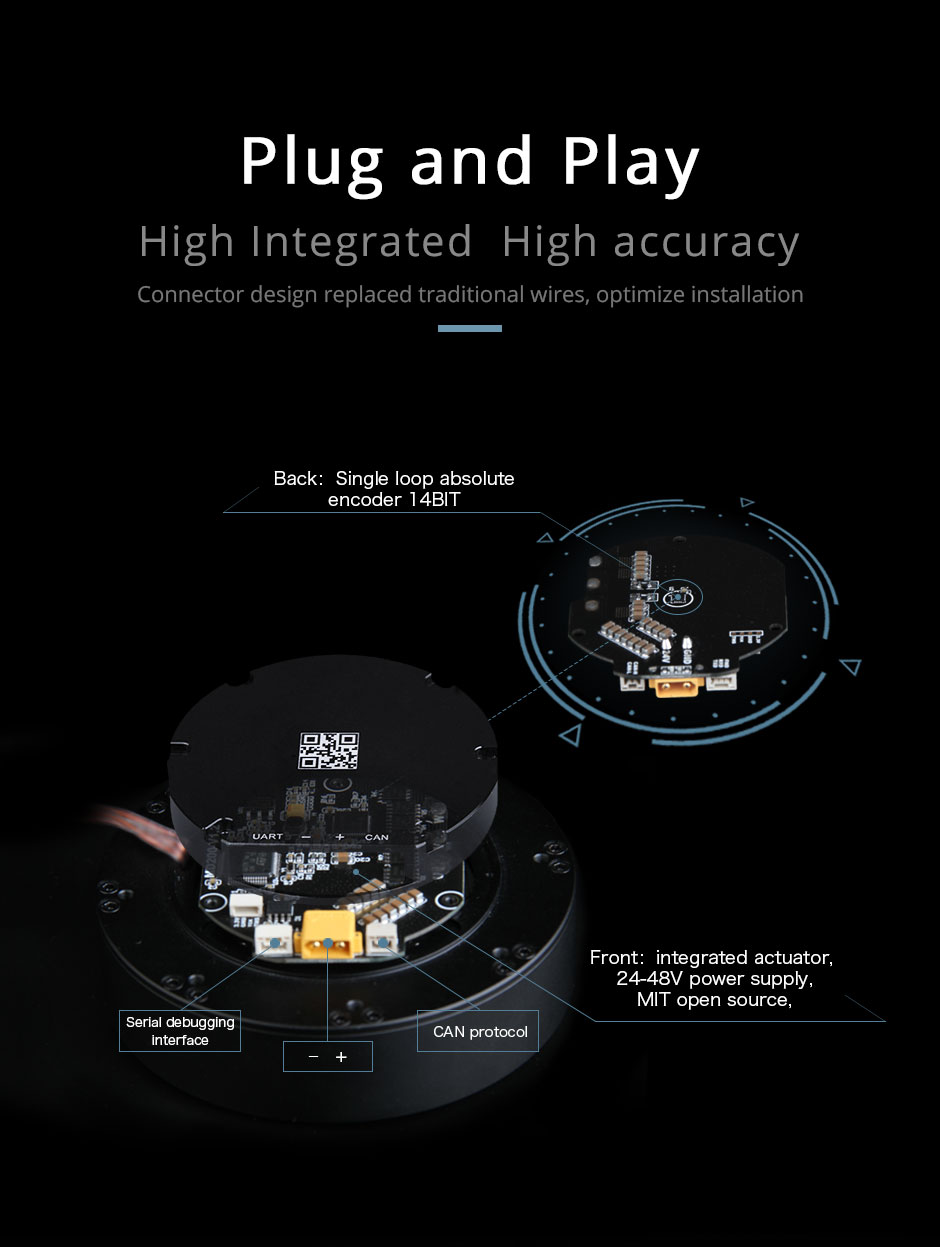
Precision Feedback: Built-in 14-bit encoder with sub-millimeter accuracy.
Compact Integration: Motor, planetary gearbox, and driver combined for tight spaces.
In the tilt test, AK70-10 KV100 robotic actuator acted like robotic muscles with reflex-level reactions. When the robot's balance shifted slightly, the robot dog motors instantly adjusted, bringing it back to a stable position. This closed-loop synergy between controller and actuator is the key to mastering dynamic terrains.
At CubeMars, we are proud to see young innovators like Arsenii Mironov pushing the limits of what's possible with robotics. We are dedicated to providing high-performance actuators for robot dogs, quadrupeds, and more — empowering the next generation of creators.