

GL40 II Gimbal Motor
Smooth Operation, Equipped Drive, Large Hollow Shaft
Install a hollow driver board for more flexible control

Equipped Drive, Great Control
Install a hollow drive board supporting CAN and PWM communication. The 3 control modes can meet different needs flexibly

Upgraded EM, Lower Cogging Torque
Upgraded electromagnetic design and motor structure. Reduce cogging torque from 1 cN.m to 0.7 cN.m, enhancing low-speed servo performance

Larger Hollow, More Compatibility
The motor's hollow shaft diameter has been increased from Ø8 mm to Ø12.5 mm, accommodating more slip rings. The overall motor diameter has been reduced from Ø46.5 mm to Ø46.1 mm

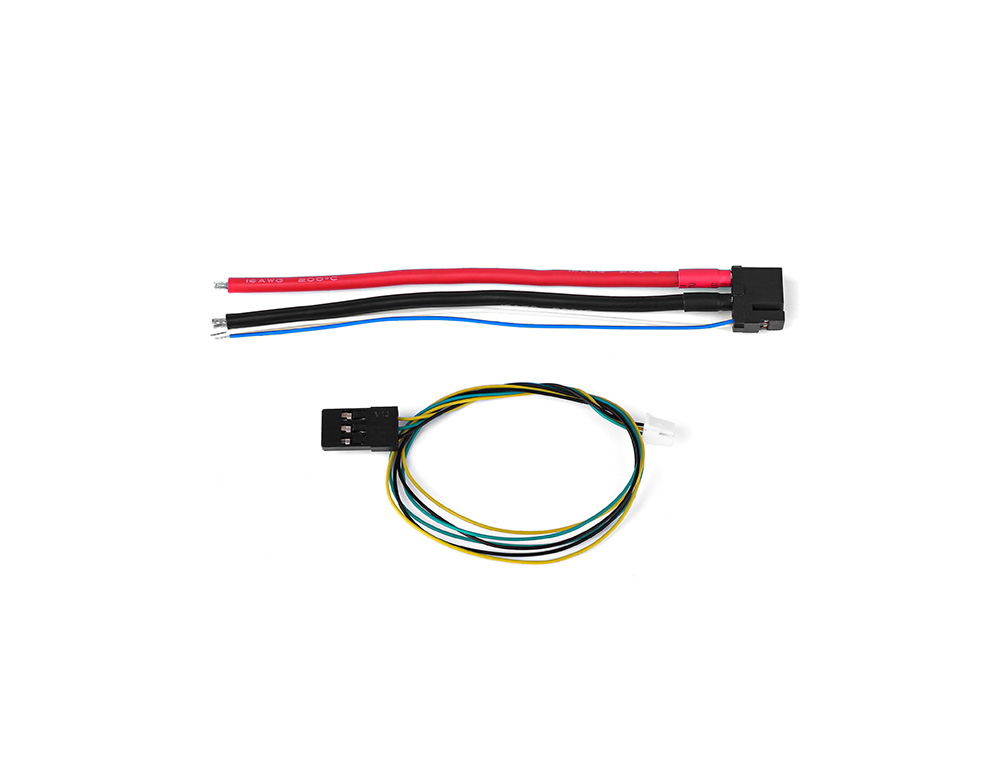
Black & White Dual Interface Free for debugging
The black is the XT30 2+2 interface, combined the power cable and CAN signal cable into one, making the signal transmission safer and more reliable; The white is a CJT-3pin interface. Convenient for connecting to the upper computer to communicate and adjust parameters

Equipped Upper Computer Easier Operation
Open current loop parameters & serial port baud rate settings One-click for motor parameter recognition. Various working mode,more flexible upper computer page selection