The GL II series motors, specifically engineered for premium gimbal systems, excel in both gimbals and autonomous driving applications. Advancing from the GL series, the GL II series incorporates a cutting-edge electromagnetic and structural design. Key enhancements include a larger hollow shaft diameter for accommodating more slip rings, optimized slot torque for improved low-speed servo performance, and a new hollow drive board for precise motor control. These upgrades deliver superior product performance and increase client satisfaction.
1. Highly Integrated (All-in-One Design)
Two-in-one structure: Compactly integrates the gimbal frameless motor with the drive control board, eliminating the need for external standalone drivers, complex wiring, and connectors.
Compact and lightweight: Reduces overall volume and weight.
2. High-Performance Core Components
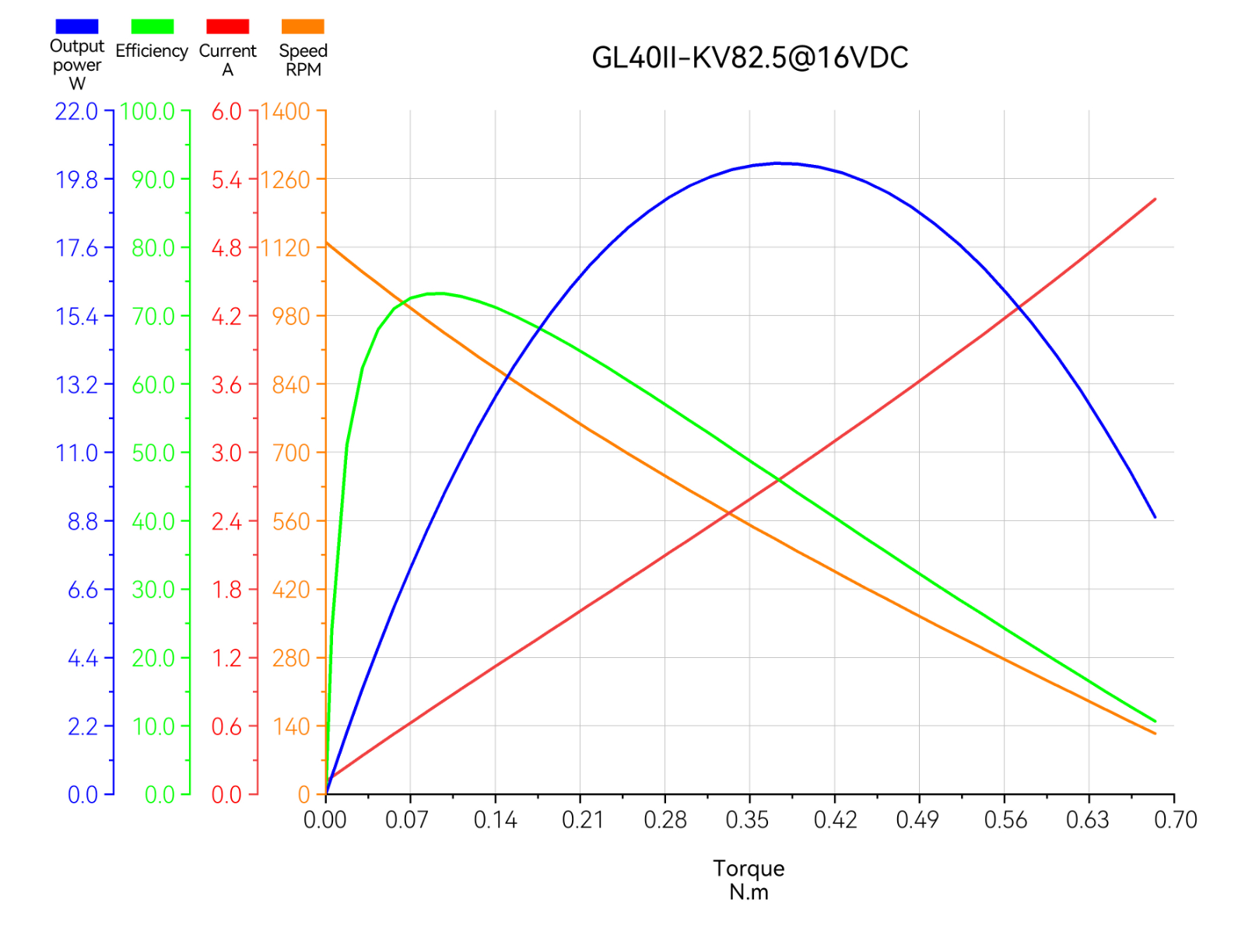
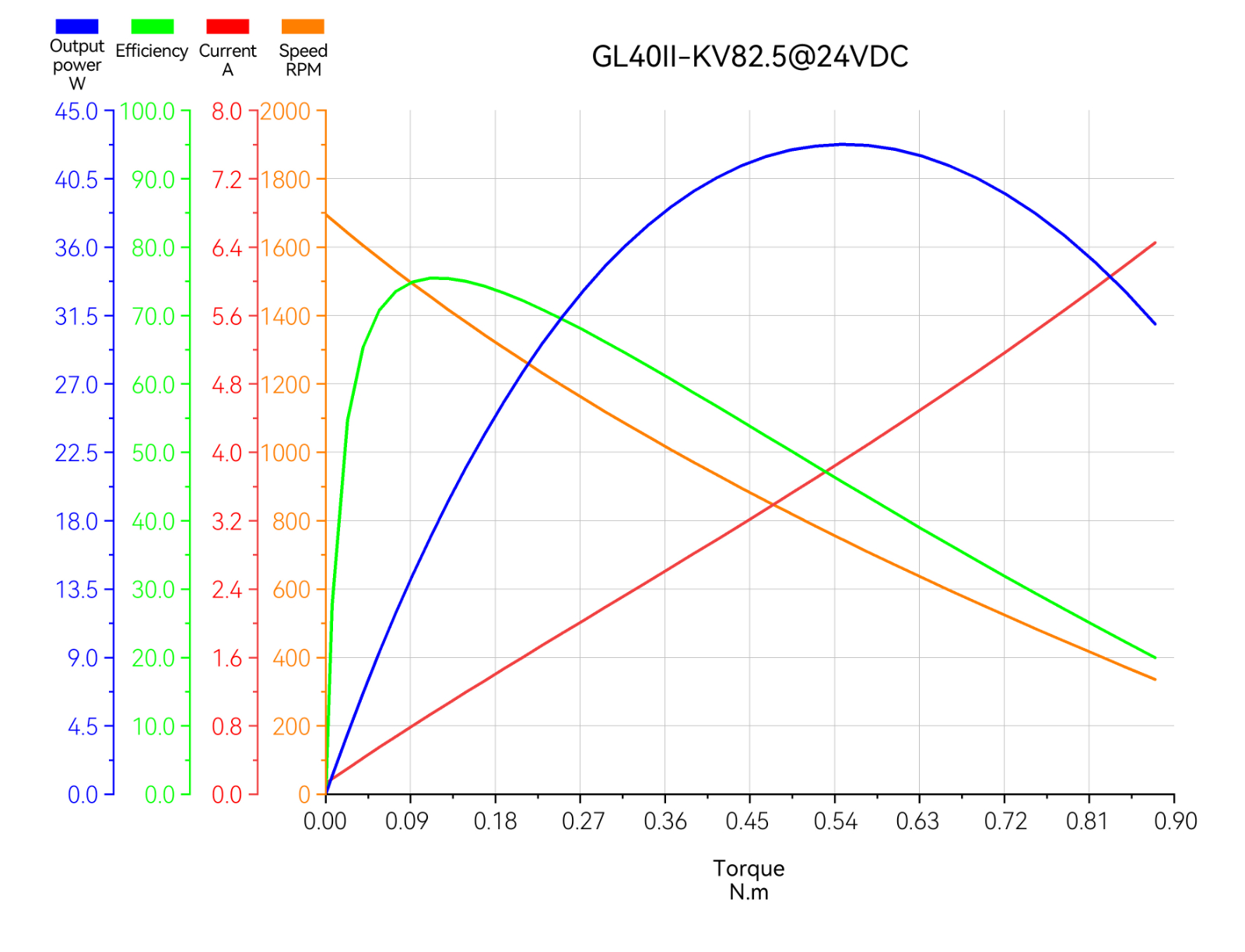
High Torque Density Motor: Utilizes premium neodymium iron boron magnets and an optimized electromagnetic design in a frameless motor, delivering exceptional torque output and efficiency while maintaining a compact footprint.
Low cogging torque design: Ensures exceptionally smooth operation at low speeds through magnetic circuit and structural optimization, eliminating stuttering or jitter for compatibility with diverse gimbal systems.
3. Intelligent Drive & Control
Multiple Control Modes: Supports torque control, speed control, and position control modes, adapt to different application scenarios.
4. Advanced Communication & Interface
Support for CAN and PWM
Plug-and-Play: Provides standardized electrical and mechanical interfaces, controllable by sending commands over the bus, significantly lowering the usage threshold.
GL40 II Gimbal Motor
Smooth Operation, Equipped
Drive, Large Hollow Shaft
Install a hollow driver board for more flexible control
Equipped Drive, Great Control
Install a hollow drive board supporting CAN and PWM communication.
The 3 control modes can meet different needs flexibly
MIT
mode
Velocity-position
mode
Velocity
mode
Upgraded EM, Lower Cogging Torque
Upgraded electromagnetic design and motor structure. Reduce cogging torque
from 1 cN.m to 0.7 cN.m, enhancing low-speed servo performance
0.7cN.m
Larger Hollow, More Compatibility
The motor's hollow shaft diameter has been increased from Ø8 mm
to Ø12.5 mm, accommodating more slip rings. The overall motor
diameter has been reduced from Ø46.5 mm to Ø46.1 mm
Ø12.5mm
The motor's hollow shaft diameter
Ø46.1mm
The overall motor diameter
Black & White Dual Interface
Free for debugging
The black is the XT30 2+2 interface, combined the power cable and
CAN signal cable into one, making the signal transmission safer and
more reliable; The white is a CJT-3pin interface. Convenient for connecting
to the upper computer to communicate and adjust parameters
XT30 2+2
Black Interface
CJT-3pin
White Interface
Equipped Upper Computer
Easier Operation
Open current loop parameters & serial port baud rate settings One-click for motor parameter recognition.
Various working mode,more flexible upper computer page selection























 GLII-Arduino test code
GLII-Arduino test code 

