Registrieren


CubeMars–Ihr Experte für zuverlässige Antriebssysteme
CubeMars Die Motoren von CubeMars sind hochgradig an die vielfältigen Anforderungen der verschiedenen Teile humanoider Roboter angepasst. Ob es sich um die Schulter- und Hüftgelenke mit hohem Drehmoment und großem Drehwinkel handelt, die Ellbogen- und Kniegelenke, die schnelle Reaktion und dynamische Steuerung erfordern, oder die Handgelenk- und Sprunggelenke, die kompakte Bauweise und präzise Bedienung benötigen – wir bieten eine vollständige Produktreihe von hohem Drehmoment-Hohlmodulen bis hin zu leichten Antriebseinheiten, um die differenzierten Anforderungen in Bezug auf Raumaufteilung, Tragfähigkeit und Steuerungsgenauigkeit zu erfüllen und dem Gesamtsystem eine harmonischere und effizientere Bewegungsleistung zu verleihen.
Schultergelenkmotor

Das Schultergelenk ist das Drehkreuz des Arms und erfordert häufiges Heben und Drehen. Unsere leichten Motoren reduzieren die Trägheit des Gesamtsystems, während sie die Stabilität bei hoher Bewegungsfrequenz aufrechterhalten und auch bei längerem Betrieb einen reibungslosen und freien Bewegungsablauf gewährleisten.

Modell-Empfehlungen
Schultergelenkmotor
Ellbogengelenkmotor
Handgelenkmotor
Hüftgelenkmotor
Kniegelenkmotor
AK70-10 führt die Zukunft der agilen Robotik an
CubeMars war schon immer bestrebt, sich an bahnbrechenden Innovationen in der Robotik zu beteiligen! Im Jahr 2023 wurde unser AK70-10 KV100 BLDC-Motor zu einer Schlüsselkomponente für den Erfolg des bahnbrechenden zweibeinigen Robotikprojekts von Nathan Eduard Weiss an der Universität Stellenbosch in Südafrika.
StaccaToe Robotics: Fusion von dynamischer Bewegung und Präzisionssteuerungen
StaccaToe ist ein einbeiniger Roboter, der an der University of Massachusetts Amherst entwickelt wurde und sich darauf konzentriert, die dynamischen Bewegungen der menschlichen Beine und Zehen zu imitieren. Der Roboter integriert die neueste Steuerungstechnologie mit fortschrittlichem Motordesign und soll erforschen, wie die Nachahmung der menschlichen Biomechanik die Roboterleistung in komplexem Gelände und bei schwierigen Aufgaben verbessern kann.
Einkaufsroboter zeigt außergewöhnliche Fähigkeiten CubeMars AK80-64 Modularer Motor hilft ihm, mit Präzision zu manövrieren
Stellen Sie sich vor, Sie betreten ein Einkaufszentrum und werden von einem 1,7 Meter großen und 70 Kilogramm schweren "Roboterangestellten" begrüßt, der Sie fragt: "Wie kann ich Ihnen helfen?"
Der Roboter von Daniel Simu steht bei America's Got Talent auf der Bühne; Motoren der AK-Serie von CubeMars treiben die Leistung an
In der kommenden Folge von America's Got Talent werden die Zuschauer die Gelegenheit haben, eine einzigartige Performance zu sehen, bei der der Künstler Daniel Simu und seine Roboter gemeinsam auf der Bühne eine atemberaubende Tanzdarbietung zeigen werden. Die Motormodule der AK-Serie von CubeMars sorgen für eine starke und stabile Leistung bei dieser spektakulären Performance.
Nepalesisches Studententeam entwickelt kostengünstige Fußgelenkprothese mit CubeMars AK60-6 Motor
Kürzlich hat ein Team nepalesischer Studenten erfolgreich einen Prototyp einer Fußgelenkprothese auf Basis des CubeMars AK60-6 V1.1 Roboteraktor entwickelt und strengen Tests unterzogen. Ziel dieses Projekts ist es, eine kostengünstige und leistungsfähige Prothesenlösung für Entwicklungsländer wie Nepal bereitzustellen.


Um den Anforderungen an Leichtbau und hohes Drehmoment von Exoskeletten gerecht zu werden, bietet CubeMars zwei Arten von Motorlösungen an: Integrierte Motoren, Getriebe und Treiber als Modulmotoren, die Plug-and-Play-fähig sind und eine schnelle Bereitstellung ermöglichen; sowie quasi-direkte Antriebsmotoren mit integriertem Motor und Getriebe, die durch ihr modulares Design eine einfache Installation ermöglichen und sich für Teams eignen, die eigene Steuerungsalgorithmen flexibel anpassen möchten. Ob für Rehabilitationsunterstützung oder Kraftverstärkung, wir bieten leistungsstarke, präzise abgestimmte Antriebslösungen für unterschiedliche Entwicklungsanforderungen.
CubeMars Roboter-Aktuator treibt Georgia Techs KI-Exoskelette an - vorgestellt in Science Advances
Das Georgia Institute of Technology hat in Zusammenarbeit mit der Stanford University und der University of Pennsylvania ein fortschrittliches KI-gesteuertes Exoskelett-System entwickelt, das darauf ausgelegt ist, die Geheffizienz in der realen Welt zu verbessern. Das Unterkörper-Roboter-Exoskelett, das kürzlich in Science Advances vorgestellt wurde (AI-driven universal lower-limb exoskeleton system for community ambulation), wird vollständig vom CubeMars AK80-9 KV100 Roboter-Aktuator angetrieben - 9Nm Nenndrehmoment, 48V, 485g - und bietet eine hocheffiziente Drehmomentregelung und präzise Bewegungen.
Schätzung der Interaktionskraft zwischen Mensch und Exoskelett basierend auf der Quasi-Direktantriebstechnologie (QDD)
Im Bereich der Mensch-Roboter-Interaktion hat sich die Exoskelett-Technologie als eine zentrale Lösung für Rehabilitation, Gehunterstützung und physische Verstärkung etabliert. Die präzise und effiziente Steuerung der Interaktionskräfte zwischen Mensch und Exoskelett bleibt jedoch eine große Herausforderung, insbesondere bei der Kraftschätzung und -regelung. Herkömmliche Methoden stützen sich auf Kraftsensoren zur Messung der Interaktionskräfte, was die Systemkomplexität und -kosten erhöht. In dieser Studie wird eine Methode zur Kraftschätzung auf Basis der Quasi-Direktantriebstechnologie (QDD) vorgestellt, die es ermöglicht, Interaktionskräfte ohne zusätzliche Kraftsensoren durch Nutzung der dynamischen Eigenschaften des Antriebs zu bestimmen.


Modell-Empfehlungen
Im Bereich der medizinischen Rehabilitation passen sich die Motoren von CubeMars dank ihres leichten Designs, ihrer hohen Steuerungsgenauigkeit und ihrer hervorragenden Betriebsstabilität an die Anforderungen verschiedener Rehabilitationsgeräte an. Für Anwendungen wie Rehabilitationstraining, Gangunterstützung und postoperative Rekonstruktion bieten wir kompakte, geräuscharme und hochreaktive Antriebslösungen, die den Geräten helfen, eine reibungslosere Bewegungssteuerung und ein komfortableres Benutzererlebnis zu erreichen.
CubeMars-Motoren unterstützen das Team von Mikael bei der Entwicklung eines selbstständigen Dehnungsgeräts und verbessern die Rehabilitationsunabhängi
Mikael, der an Muskeldystrophie leidet, hat zusammen mit seinem Team ein innovatives Dehnungsgerät für die Waden entwickelt, das CubeMars-Motoren nutzt und Patienten mit neuromuskulären Erkrankungen eine bequemere Rehabilitationsmöglichkeit bietet.

Modell-Empfehlungen
Die Gimbal-Motoren von CubeMars zeichnen sich durch hohe Stabilität, hohe Steuerungsgenauigkeit und geräuscharmen Betrieb aus und eignen sich für Mehrrotationsplattformen, visuelle Systeme und leichte Roboterarme. Die aufgerüstete GLⅡ-Serie integriert ein hohles Treiberplattendesign, das eine hohe Integration ermöglicht und gleichzeitig einen hohlen Kanal beibehält, um die Verkabelung und modulare Integration zu erleichtern und eine bessere Lösung für die Systemanordnung und die Zuverlässigkeit des gesamten Geräts zu bieten.
GL60II Hollow Gimbal Motor treibt RoboMaster-Ingenieurroboter an
RoboMaster ist einer der renommiertesten Robotikwettbewerbe in China und fordert junge Ingenieure dazu heraus, Innovationen zu entwickeln und ihre praktischen Fähigkeiten in realen Wettkampfszenarien unter Beweis zu stellen. Unter den verschiedenen Robotertypen auf dem Spielfeld spielt der Ingenieurroboter eine entscheidende Rolle: Er ist dafür verantwortlich, verstreute „Gold“- und „Silber“-Ressourcen auf dem Feld zu sammeln und sie zu den vorgesehenen Austauschzonen zu transportieren – ein taktischer Kern, um während des Spiels wirtschaftliche Vorteile zu erzielen.

Modell-Empfehlungen
In Anwendungen für vierbeinige Roboter bieten die Motoren von CubeMars mit ihrer hohen Drehmomentdichte, schnellen Reaktion und hervorragenden Wärmeableitung die notwendige Antriebskraft für dynamische Bewegungen wie Gehen, Springen und Klettern. Wir bieten mehrere Motorlösungen für Hüft-, Knie- und Sprunggelenke an, die hochfrequente Starts und Stopps sowie präzise Haltungssteuerung unterstützen und vierbeinigen Robotern helfen, flexible und stabile All-Terrain-Bewegungsfähigkeiten zu erreichen.
CubeMars unterstützt die University of Minnesota beim Bau eines landwirtschaftlichen vierbeinigen Roboterdogs: Hochintegrierte Motoren treiben die int
Auf den weiten Feldern der University of Minnesota in den USA flitzt ein wendiger vierbeiniger Roboterdog durch die Maisreihen. Er kann nicht nur geschickt Hindernissen ausweichen, sondern sammelt auch präzise Daten über Boden und Pflanzen, führt Inspektionen und Probenahmen durch – und das alles treibt die Grenzen der intelligenten Landwirtschaft immer weiter voran.
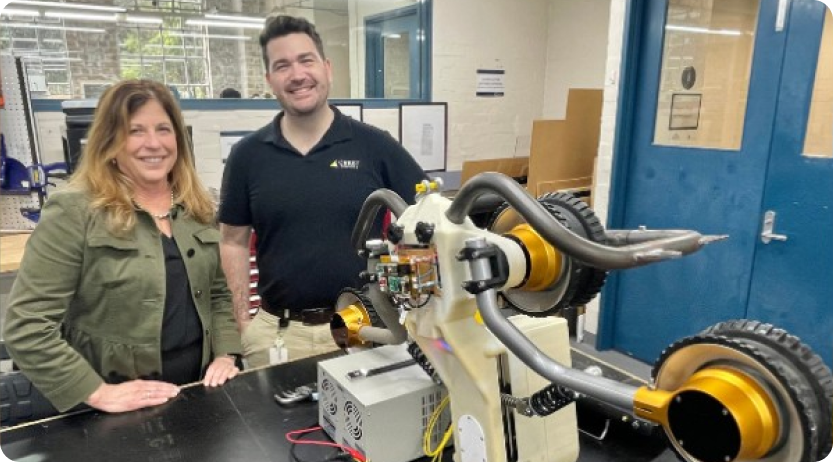
Kemba: Ein vierbeiniger Roboter, der Kraft und präzise Steuerung kombiniert
Die Entwicklung von Robotern mit dynamischer Gangart und hoher Manövrierfähigkeit steht im Mittelpunkt der Forschung, die von der modernen Robotik vorangetrieben wird. Ein Forscherteam der Universität Kapstadt hat mit Kemba einen innovativen vierbeinigen Roboter vorgestellt, der mit einer Hybridkonstruktion aus Elektro- und Pneumatikantrieb ausgestattet ist und sich durch dynamisches Verhalten und präzise Steuerung auszeichnet.


Modell-Empfehlungen
CubeMars bietet zuverlässige Motorlösungen für Radroboter, die kontinuierliche Rotation, präzise Steuerung und effiziente Leistungsausgabe unterstützen. Die Motoren sind kompakt konstruiert und bieten gleichzeitig hervorragende Drehmomentleistungen, die sich für autonome mobile Plattformen, AMR, Inspektions-AGVs und andere Szenarien eignen und den Antriebsbedarf von Radrobotern für hohe Reaktionsfähigkeit, hohe Belastung und langanhaltenden stabilen Betrieb erfüllen.
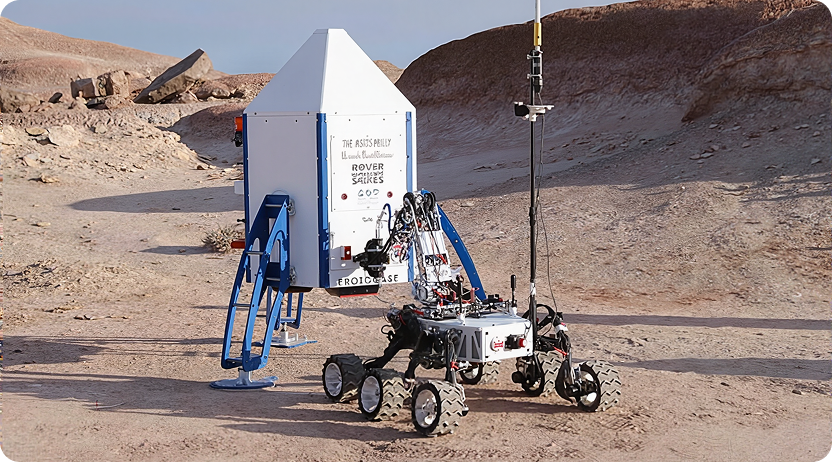
Das Robotik-Team der Toronto Metropolitan University gewinnt den zweiten Platz für kanadische Teams bei der University Mars Rover Challenge
Das Toronto Metropolitan University Robotics Team (TMR) vereint führende Köpfe aus einer Vielzahl von Disziplinen, die sich gemeinsam dem Entwurf, der Entwicklung und dem Bau von wettbewerbsfähigen, leistungsstarken Robotern verschrieben haben.
CubeMars sponsert 2024 Binghamton University Robotics Team für URC Wettbewerb
CubeMars ist stolz darauf, das Binghamton University Robotics Team 2024 bei der University Rover Challenge (URC), einem von der NASA veranstalteten Wettbewerb, zu sponsern. Wissen anzuwenden, um Roboter für die Erkundung des Mars zu entwerfen, zu bauen und zu betreiben.

Modell-Empfehlungen
CubeMars konzentriert sich auf industrielle Anwendungen und bewältigt mit hohem Drehmoment mühelos schwere Lasten. Das modulare, frei montierbare Design ermöglicht die flexible Integration von Encodern, Getrieben und anderen Komponenten, um schnell auf die vielfältigen Anforderungen von CNC-Maschinen, Logistiklinien und anderen Anwendungen zu reagieren und die Bereitstellungs- und Wartungskosten zu senken. Die Produkte unterstützen verschiedene Installationsmethoden, passen sich unterschiedlichen Raumlayouts an und bieten hervorragende Steuerungsgenauigkeit und dynamische Reaktionsleistung, um den strengen Anforderungen an hochintensive Dauerläufe und präzise Bewegungssteuerung in industriellen Umgebungen gerecht zu werden.
Gorilla Mk1-Roboter: Mit CubeMars-Motoren ausgestattet, neue Durchbrüche bei Höhenarbeiten
Im Bereich der Höhenarbeiten im australischen Übertragungsnetz verändert ein innovativer Roboter, entwickelt von C Company, leise die Arbeitsweise. Der Roboter mit dem Namen Gorilla Mk1 bietet mit fortschrittlicher Technologie und präzisem Antriebssystem bisher unerreichte Sicherheit und Effizienz bei Wartungs- und Inspektionsarbeiten an Hochspannungsleitungen. Im Hintergrund ist der RI80 V2.0-Motor von CubeMars ein wichtiger Kern seines Antriebssystems.
Modell-Empfehlungen
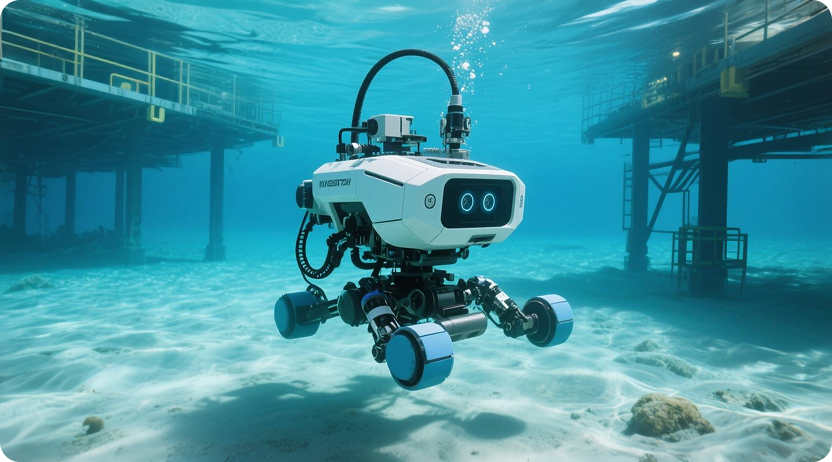
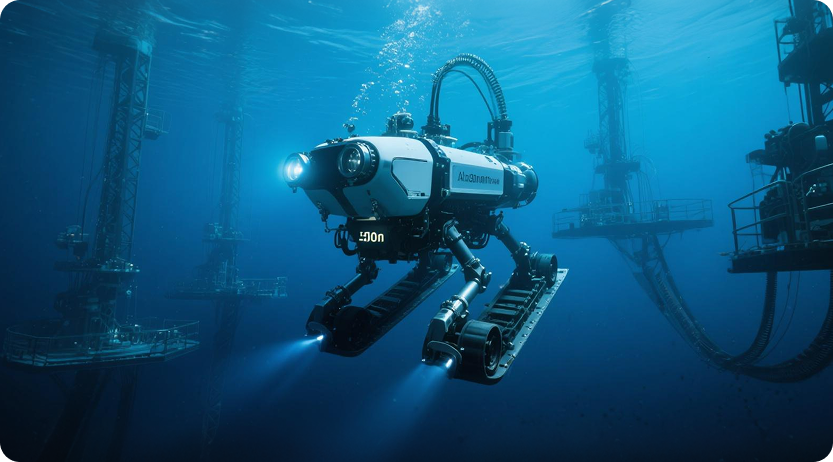
In Anwendungen für Unterwasserroboter bietet CubeMars mehrere speziell für Unterwasserumgebungen entwickelte Antriebsmotoren an, die einen Tiefenbereich von 0 bis 350 Metern abdecken und den Anforderungen verschiedener Szenarien wie Flachwasserarbeiten und Tiefseeerkundung gerecht werden. Die Motoren verfügen über einen hohen Schutzgrad, eine korrosionsbeständige Struktur und eine starke Schubkraft, die auch in komplexen Gewässern eine stabile Leistung gewährleisten und in ROVs, AUVs, Unterwasserarbeitsplattformen und anderen Unterwassergeräten weit verbreitet sind.
Wassertiefe 0-30m
Geeignet für Flachwasserfahrten, z.B. elektrische Paddelbretter, ferngesteuerte Boote
Wassertiefe 0-350m
Geeignet für Tiefseearbeiten, z.B. ROVs, Unterwasserarbeitsplattformen
Modell-Empfehlungen