Create your CubeMars account

In recent decades, robotic exoskeletons and wearable devices have experienced rapid growth, becoming essential tools in rehabilitation and mobility assistance. In knee rehabilitation, exoskeletons provide active support and enhanced functionality, improving patient recovery efficiency while reducing the workload for physical therapists.
A research team at Khalifa University developed a novel knee exoskeleton with tunable compliance, addressing the limitations of traditional systems that often offer only a narrow stiffness range or slow response. This new design enables real-time stiffness adjustment throughout the gait cycle, accurately replicating the natural variation of human knee stiffness.
Studies show that during normal walking, the knee joint requires a range of motion of about 10°–105°, with torque demands rising from approximately 40 N·m on flat ground to more than 100 N·m when descending stairs. The knee stiffness itself fluctuates significantly across the gait cycle—from as high as 450 N·m/rad in early stance to around 30 N·m/rad at the end of the support phase. The Khalifa University design successfully matches these biomechanical requirements, offering an optimal stiffness range of 30–450 N·m/rad.
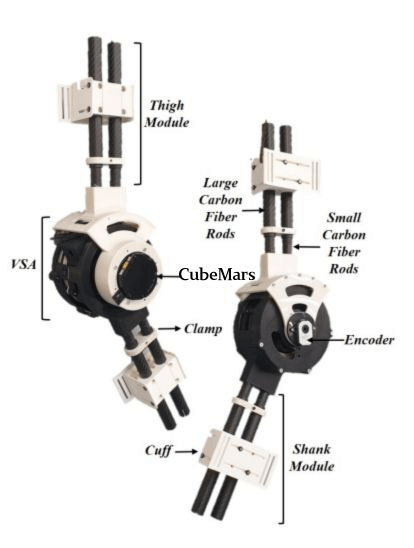
To achieve this performance, the system integrates the CubeMars AK80-64 KV80 Exoskeleton motor as an external high-torque actuator driving the variable stiffness actuator (VSA). The AK80-64 provided the precision and power needed to reproduce natural knee mechanics:
High torque density – Compact size with powerful output, ideal for lower-limb exoskeletons.
Precise control – Enables fast stiffness transitions at the start of the gait cycle and smoother adjustments during the swing phase.
Energy efficiency – Extends runtime and reduces power consumption during rehabilitation sessions.
Seamless integration – Modular design simplifies integration into robotic exoskeleton systems.
Product | Size | Weight | Rated RPM | Rated Torque | Peak Torque | Max Torque Density |
AK80-64 KV80 | 98×62 mm | 850 g | 48 rpm | 48 Nm | 120 Nm | 141.2 Nm/kg |

Testing confirmed that the prototype could dynamically adjust stiffness in line with human biomechanics, accurately tracking knee stiffness changes at walking speeds of 1.0–1.5 m/s. Compared with earlier designs, the response speed was significantly improved, allowing safe, natural, and efficient gait rehabilitation.
This collaboration highlights both the promise of variable stiffness knee exoskeletons for clinical rehabilitation and the reliability of CubeMars actuators in cutting-edge robotics. With its proven high performance, the CubeMars AK80-64 robotic actuator continues to empower research and industrial applications in rehabilitation robotics, wearable exoskeletons, and human-robot interaction systems.
References:Design and Validation of a Knee Exoskeleton with Tunable Compliance for Gait Rehabilitation


