CubeMars 계정 만들기


CubeMars – 신뢰할 수 있는 파워 솔루션
큐브마스 모터는 휴머노이드 로봇 관절의 다양한 요구를 충족하도록 설계되었습니다. 어깨 및 엉덩이——넓은 회전각을 가진 고토크 솔루션. 팔꿈치 및 무릎——빠른 응답성과 동적 제어. 손목 및 발목——컴팩트하고 정밀한 구동. 중공 모듈부터 소형 유닛까지, 당사 모터는 다양한 공간, 하중 및 제어 요구를 충족하여 더 부드럽고 효율적인 동작을 가능하게 합니다.
어깨 관절

확인 어깨 관절은 팔의 중심축으로, 빈번한 들어올림과 회전이 필요합니다. 당사의 경량 모터는 고주파 동작 중 안정성을 유지하면서 전체 관성을 줄여 장기간에 걸쳐 부드러운 작동을 보장합니다.

추천 제품
어깨 관절
팔꿈치 관절
손목 관절
고관절
무릎 관절
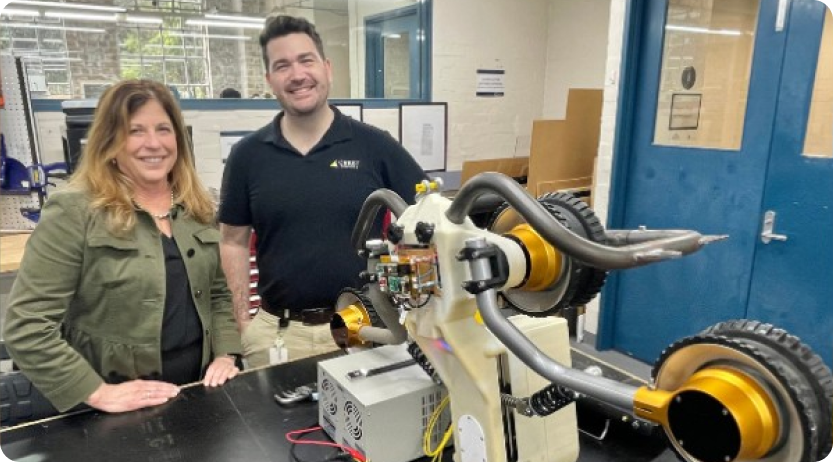
큐브마스의 AK70-10, 민첩한 로봇공학의 미래를 이끌다
큐브마스는 로봇공학 분야의 첨단 혁신에 동참하게 되어 매우 기쁘게 생각합니다! 지난해, 우리의 AK70-10 KV100 로봇 액추에이터는 남아프리카 공화국 스텔렌보스 대학에서 네이선 와이스가 진행한 획기적인 이족 보행 로봇 프로젝트의 성공에 핵심적인 역할을 했습니다.
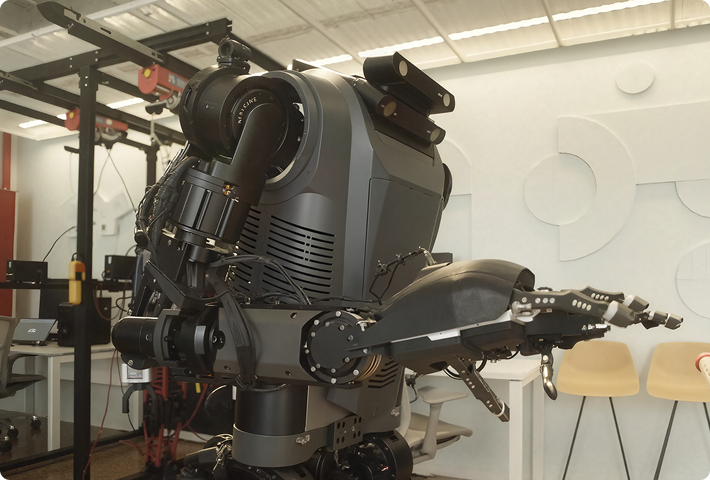
스태카토 로봇: 역동적 움직임과 정밀 제어의 융합
매사추세츠 대학교 애머스트 캠퍼스에서 개발한 스태카토 로봇은 인간의 다리와 발가락 움직임을 모방하도록 설계된 단일 다리 로봇입니다. 이 첨단 로봇은 고급 제어 기술과 혁신적인 모터 설계를 통합하여 인간의 생체역학을 모방하는 것이 복잡한 지형 탐색 및 고난이도 작업 수행 성능을 어떻게 향상시킬 수 있는지 탐구합니다.
다니엘 시무의 로봇, 큐브마스의 AK 시리즈 모터로 ‘아메리카 갓 탤런트’ 무대 장악
곧 방영될 ‘아메리카 갓 탤런트’ 에피소드에서 관객들은 아티스트 다니엘 시무가 특별 제작한 로봇과 함께 무대에 올라 매혹적인 댄스 공연을 선보이는 독특한 퍼포먼스를 목격하게 될 것입니다. 이 매혹적인 공연은 큐브마스의 AK 시리즈 로봇 액추에이터가 제공하는 강력하고 안정적이며 신뢰할 수 있는 동력 지원 없이는 불가능했을 것입니다.
네팔 학생팀, CubeMars AK60-6 모터를 활용한 저비용 발목-발 의족 프로토타입 개발
최근 네팔 학생팀이 CubeMars AK60-6 V1.1 로봇 액추에이터를 기반으로 발목-발 의족 프로토타입을 성공적으로 개발하고 엄격한 테스트를 진행했습니다. 이 프로젝트는 네팔과 같은 개발도상국에 저렴하면서도 고성능의 의족 솔루션을 제공하는 것을 목표로 합니다.


CubeMars 는 외골격의 경량화 및 고토크 요구 사항을 충족하는 두 가지 솔루션을 제공합니다. 통합 모듈 모터: 모터, 감속기, 드라이버를 결합한 플러그 앤 플레이 방식으로 신속한 배포가 가능합니다. QDD 모터: 모터와 감속기가 통합되었으나 드라이버는 별도로 제공되어 설치가 용이하며 맞춤형 제어 알고리즘을 사용하는 팀에 이상적입니다. 재활 목적이나 근력 강화 목적에 관계없이, 다양한 개발 요구사항에 부합하는 고성능의 최적화된 동력 솔루션을 제공합니다.
CubeMars 로봇 액추에이터, 조지아 공대 AI 외골격 시스템에 동력 공급… 'Science Advances'에 소개
조지아 공대는 스탠퍼드 대학 및 펜실베이니아 대학과 협력하여 실제 보행 효율성을 향상시키도록 설계된 첨단 AI 기반 외골격 시스템을 개발했습니다. 최근 Science Advances에 소개된 하체 로봇 외골격(AI 기반 보편적 하체 외골격 시스템, 지역사회 보행용[1])은 CubeMars AK80-9 KV100 로봇 액추에이터(정격 토크 9Nm, 48V, 485g)로 전동 구동되어 고효율 토크 제어와 정밀한 움직임을 제공합니다.
준직접 구동(QDD) 기술을 기반으로 한 인간-외골격 상호작용 힘 추정
인간-로봇 상호작용 분야에서 외골격 기술은 재활, 보조 보행, 신체 능력 증강을 위한 핵심 솔루션으로 부상했습니다. 그러나 효율적이고 정밀한 인간-외골격 상호작용, 특히 힘 추정 및 제어의 달성은 여전히 중요한 과제입니다. 기존 방법은 상호작용력을 측정하기 위해 힘 센서에 의존하여 시스템 복잡성과 비용을 증가시킵니다. 본 연구는 준직접 구동(QDD) 기술을 기반으로 한 힘 추정 방법을 소개하며, 추가적인 힘 센서 없이 상호작용력을 추정할 수 있게 합니다.


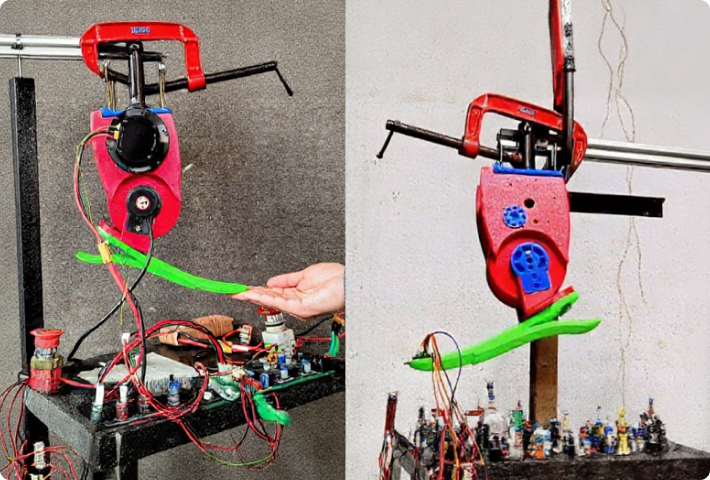
의료 재활 분야에서 CubeMars 모터는 경량 설계, 높은 제어 정밀도, 우수한 작동 안정성 덕분에 널리 사용됩니다. 재활 훈련, 보행 보조, 수술 후 회복과 같은 응용 분야를 위해 컴팩트하고 저소음이며 반응성이 뛰어난 동력 솔루션을 제공하여 더 부드러운 모션 제어와 편안한 사용자 경험을 가능하게 합니다. 큐브마스 모터, 미카엘 팀의 자율 스트레칭 장치 개발 지원
큐브마스의 짐벌 모터는 높은 안정성, 정밀 제어, 저소음 작동을 제공하여 회전 플랫폼, 비전 시스템, 경량 로봇 팔에 이상적입니다. 업그레이드된 GLⅡ 시리즈는 중공 구동부를 통합하여 컴팩트한 설계, 쉬운 배선, 향상된 시스템 신뢰성을 가능하게 합니다.
로보마스터 엔지니어링 로봇을 구동하는 GL60II 중공 짐벌 모터
로보마스터는 중국에서 가장 권위 있는 로봇 경진대회 중 하나로, 젊은 엔지니어들이 실제 전투 시나리오에서 혁신과 실전 능력을 입증하도록 독려합니다. 전장에서 수행하는 다양한 로봇 역할 중 엔지니어링 로봇은 핵심적인 역할을 담당합니다. 이 로봇은 전장에 흩어진 ‘금'과 '은’ 광물 자원을 수집하여 지정된 교환 구역으로 운반하는 임무를 맡고 있으며, 이는 게임 중 경제적 우위를 점하기 위한 전술적 핵심입니다.

로봇 개 응용 분야에서 CubeMars 모터는 높은 토크 밀도, 빠른 응답성, 우수한 방열 성능을 제공하여 걷기, 점프, 등반과 같은 역동적인 움직임의 까다로운 구동 요구를 충족합니다. 우리는 빈번한 시작-정지와 정밀한 자세 제어를 지원하는 고관절, 무릎, 발목 관절용 다양한 모터 솔루션을 제공하여 로봇 개가 모든 지형에서 민첩하고 안정적으로 이동할 수 있도록 합니다.
CubeMars 미네소타 대학 농업용 사족 로봇 구현: 고집적 모터로 스마트 농업 주도
미네소타 대학의 광활한 농장 지대를 가로지르며, 민첩한 사족 로봇 개가 옥수수밭 사이를 누비고 다닙니다. 장애물을 능숙하게 회피할 뿐만 아니라 정밀한 토양 및 작물 데이터를 수집하며, 점검 및 샘플링과 같은 작업을 수행합니다. 이 모든 것이 스마트 농업의 가능성을 확장하고 있습니다.
켐바: 힘과 정밀 제어를 결합한 사족 보행 로봇
현대 로봇공학의 발전에 힘입어 역동적인 보행과 높은 기동성을 갖춘 로봇 개발은 연구의 최전선이 되었습니다. 케이프타운 대학교 연구팀은 켐바(Kemba)라는 혁신적인 사족 보행 로봇을 선보였습니다. 켐바는 전기 및 공압 액추에이터의 하이브리드 설계를 채택하여 역동적인 동작과 정밀 제어에서 뛰어난 성능을 보여줍니다.


큐브마스는 휠 로봇을 위한 고신뢰성 모터 솔루션을 제공하여 연속 회전, 정밀 제어, 효율적인 출력을 지원합니다. 컴팩트한 설계와 우수한 토크 성능을 갖춘 이 모터들은 자율 이동 플랫폼, AMR, 검사용 AGV 및 다양한 응용 분야에 이상적이며, 높은 반응성, 중량 하중, 장기 안정적 작동이라는 휠 로봇의 까다로운 요구 사항을 충족합니다.
토론토 메트로로보틱스, 대학 로버 챌린지에서 캐나다 2위 달성
토론토 메트로로보틱스(TMR)는 토론토 메트로폴리탄 대학교를 기반으로 한 다학제적 로봇 공학 집단으로, 경쟁력 있는 로봇의 설계, 개발 및 제조를 위해 다양한 학부의 학생들이 연합하여 구성되었습니다.
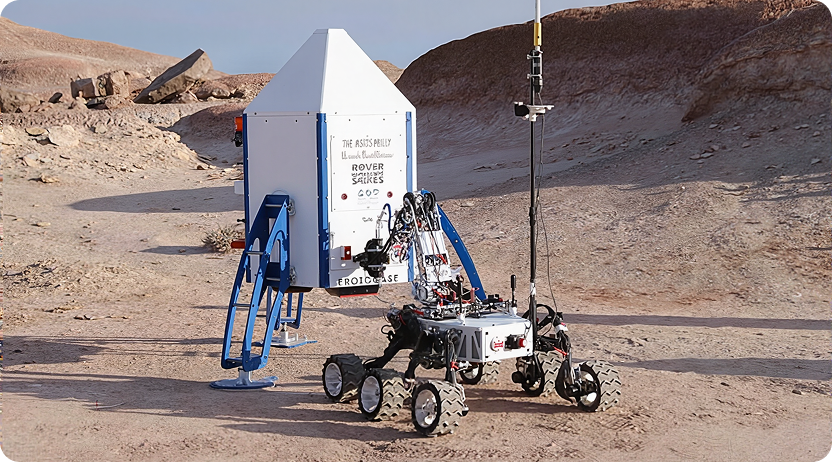
큐브마스가 2024년 대학 로버 챌린지(URC) 참가를 위해 빙엄턴 대학교 로봇공학 팀을 후원합니다
큐브마스는 미국 항공우주국(NASA)이 주최하는 2024 대학 로버 챌린지(URC) 참가를 위해 빙엄턴 대학교 로봇팀을 후원하게 된 것을 기쁘게 발표합니다. URC는 대학생들이 과학, 기술, 공학, 수학(STEM) 지식을 활용하여 화성 탐사를 위한 로봇을 설계, 제작, 운영하도록 장려하는 국제 로봇 경진대회입니다.

큐브마스는 산업용 애플리케이션에 중점을 두어 중량물 처리를 위한 높은 토크 출력을 제공합니다. 모듈식 설계로 인코더와 기어박스를 유연하게 통합할 수 있어 CNC 기계, 물류 라인 등에 신속하게 적용 가능합니다. 다양한 장착 옵션을 지원하여 지속적인 고강도 산업용 사용 시 정밀한 제어와 동적 응답을 보장합니다.
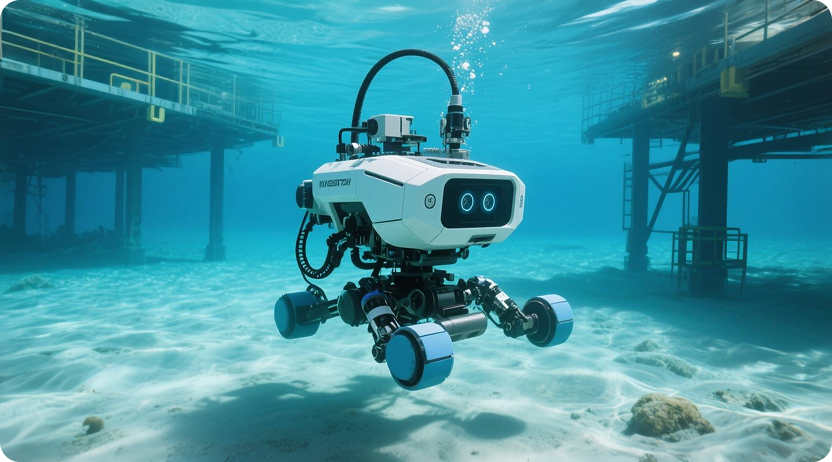
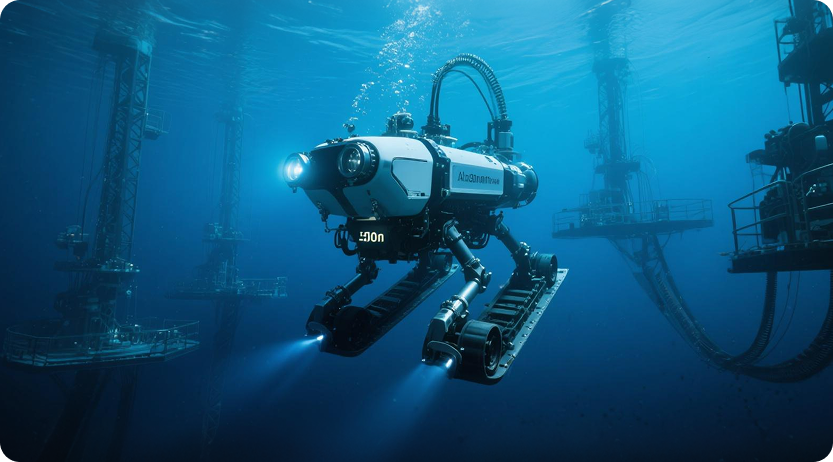
수중 로봇 응용 분야에서 큐브마스는 수중 환경을 위해 특별히 설계된 다양한 스러스터 모터를 제공합니다. 0~350m 수심 범위로 얕은 물 작업부터 심해 탐사까지 다양한 요구를 충족합니다. 이 모터들은 높은 보호 등급, 부식 방지 구조, 강력한 추력을 특징으로 하며 복잡한 수중 환경에서도 안정적인 출력을 유지합니다. ROV, AUV, 수중 작업 플랫폼 등 다양한 수중 장치에 널리 사용됩니다.