创建您的CubeMars账号


CubeMars 可靠的动力系统提供商
CubeMars电机高度适配人形机器人各部位的多样化需求。无论是大扭矩输出、旋转角度广的肩关节和髋关节,还是需快速响应、动态控制的肘关节和膝关节,或者是结构紧凑、精细操作的腕关节和踝关节,我们提供从高扭矩中空模组到轻量型动力单元的全系列产品,满足各关节在空间布局、负载能力、控制精度等方面的差异化要求,为整机系统带来更协调、更高效的运动表现。
肩关节电机

肩关节是手臂的枢纽,需要频繁抬举和旋转。我们的轻量化电机在保持高频运动稳定性的同时,降低整机惯量,确保长时间运作依然流畅自如。

机型推荐
肩关节电机
肘关节电机
腕关节电机
髋关节电机
膝关节电机
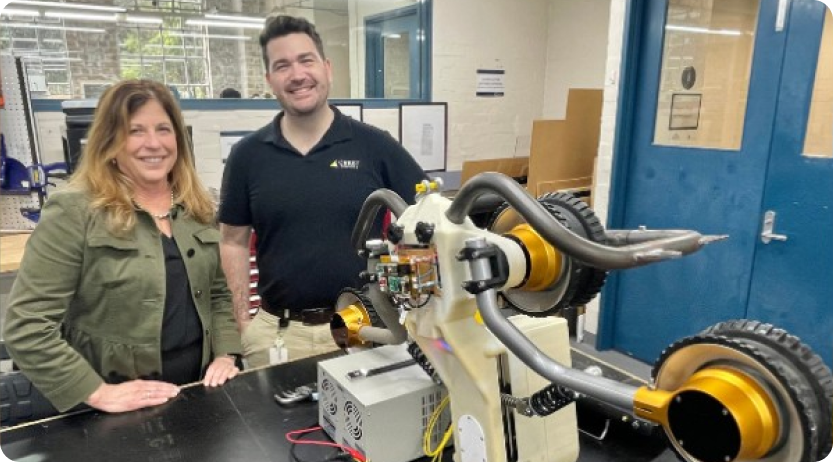
AK70-10引领敏捷机器人技术的未来
CubeMars一直致力于参与机器人技术的前沿创新!在2023年,我们的AK70-10 KV100 机器人动力模组(执行器)成为南非斯泰伦博斯大学Nathan Eduard Weiss开创性双足机器人项目成功的关键组成部分。
StaccaToe 机器人:动态运动与精密控制的融合
StaccaToe 是一款由马萨诸塞大学阿默斯特分校开发的单足机器人,专注于模仿人类腿部和脚趾的动态运动。这款机器人集成了最新的控制技术与先进的电机设计,旨在探索如何通过模仿人类的生物力学来提升机器人在复杂地形和高难度任务中的表现。
购物机器人展现超凡能力 CubeMars AK80-64模组电机助力其精准操控
想象一下,你走进一家购物中心,一位身高1.7米、体重约70公斤的“机器人店员”亲切地向你问好:“有什么可以帮到您的吗?”这并不是科幻电影的场景,而是MenteeBot为我们带来的现实体验。
Daniel Simu的机器人荣登美国达人秀舞台,CubeMars AK系列电机助力表演
在即将播出的美国达人秀中,观众们将有机会目睹一场别开生面的表演,艺术家Daniel Simu将携手他设计的机器人共同登上舞台,进行一场惊艳的共舞表演。这一精彩的表演离不开CubeMars的AK系列电机模组,为此次表演提供了强大而稳定的动力支持。
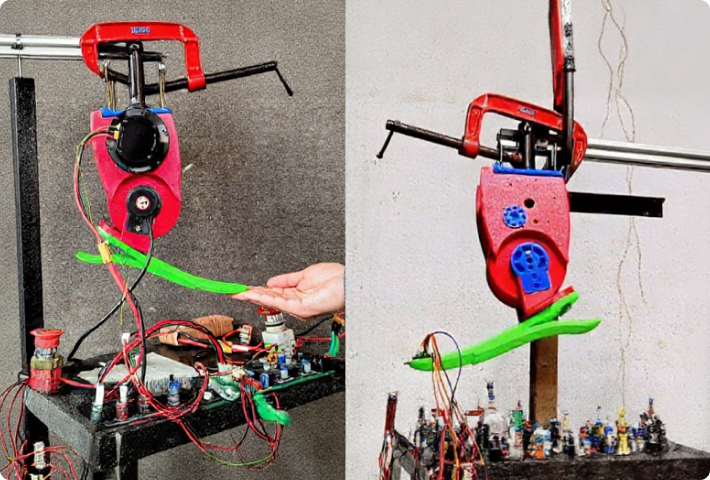
尼泊尔学生团队利用CubeMars AK60-6电机开发低成本踝足假肢原型
近日,一支由尼泊尔学生组成的团队成功完成了基于CubeMars AK60-6 v1.1机器人动力模组的踝足假肢原型开发,并通过了严格的测试。该项目旨在为尼泊尔等发展中国家提供低成本、高性能的假肢解决方案。


针对外骨骼的轻量化与大扭矩需求,CubeMars提供两类电机解决方案:集成电机、减速器与驱动的模组电机,即插即用,便于快速部署;以及集成电机与减速器的准直驱电机,分体设计易于安装,适合自有控制算法的团队灵活适配驱动系统。无论是康复辅助还是力量增强,我们都能为不同研发需求提供高性能、精匹配的动力解决方案。
CubeMars机器人动力模组助力乔治亚理工学院AI外骨骼登上《Science Advances》
重新定义人类移动能力乔治亚理工学院与斯坦福大学和宾夕法尼亚大学合作,开发了一套具备高度环境感知能力的先进AI驱动下肢外骨骼系统,旨在提升人类在真实世界中的行走效率。这款机器人下肢外骨骼最近登上《Science Advances》,完全由CubeMars AK80-9 KV100机器人动力模组驱动——NM9Nm,48V,485g,提供高效扭矩控制和精确运动。
基于准直驱动(QDD)技术的外骨骼交互力估计
在人机交互领域,外骨骼技术已成为康复、辅助行走和增强体能的重要手段。然而,实现高效、精准的人-外骨骼交互仍然面临诸多挑战,尤其是在力估计和控制方面。传统方法依赖力传感器来测量交互力,但这增加了系统的复杂性和成本。本研究提出了一种基于准直驱动(QDD)技术的交互力估计算法,能够在无力传感器的情况下,通过电机自身的动力学特性推算外骨骼与人体之间的作用力。


在医疗康复领域,CubeMars电机凭借轻量化设计、高控制精度和出色的运行稳定性,广泛适配各类康复设备需求。针对康复训练、步态辅助、术后重建等不同应用,我们提供结构紧凑、低噪音、高响应的动力解决方案,帮助设备实现更平稳的运动控制与更舒适的用户体验。
CubeMars云台电机具备高稳定性、高控制精度与低噪运行等核心优势,广泛适用于多旋转平台、视觉系统与轻量型机械臂。升级版GLⅡ系列集成中空驱动板设计,在实现高集成度的同时保留中空通道,便于走线与模块化集成,为系统布局和整机可靠性提供更优解决方案。
在四足机器人应用中,CubeMars电机以高扭矩密度、快速响应和出色的散热性能,满足机器人在行走、跳跃、爬坡等动态运动中的高强度驱动需求。我们提供多款适用于髋关节、膝关节和踝关节的电机方案,支持高频率启停与精准姿态控制,助力四足机器人实现灵活、稳定的全地形运动能力。
CubeMars助力明尼苏达大学打造农用四足机器狗:高集成电机赋能智能农业
在美国明尼苏达大学广阔的农田里,一台灵巧的四足机器狗正穿梭于玉米地间。它不仅能灵活避障,还能精准采集土壤和作物数据,执行巡检、采样等多项任务。这一切,正推动着智能农业的边界不断拓展。
Kemba:融合动力与精密控制的四足机器人
在现代机器人技术的推动下,开发动态步态和高机动性的机器人成为研究前沿。开普敦大学的研究团队推出了创新性的四足机器人——Kemba。Kemba采用了混合电动和气动的设计,展示了其在动态行为和精准控制方面的卓越性能。


CubeMars为轮式机器人提供高可靠性的电机解决方案,支持连续旋转、精准控制和高效能输出。电机设计紧凑结构同时具备出色的扭矩表现,适用于自主移动平台、AMR、巡检AGV等多种场景,满足轮式机器人对高响应、高负载和长时间稳定运行的动力需求。
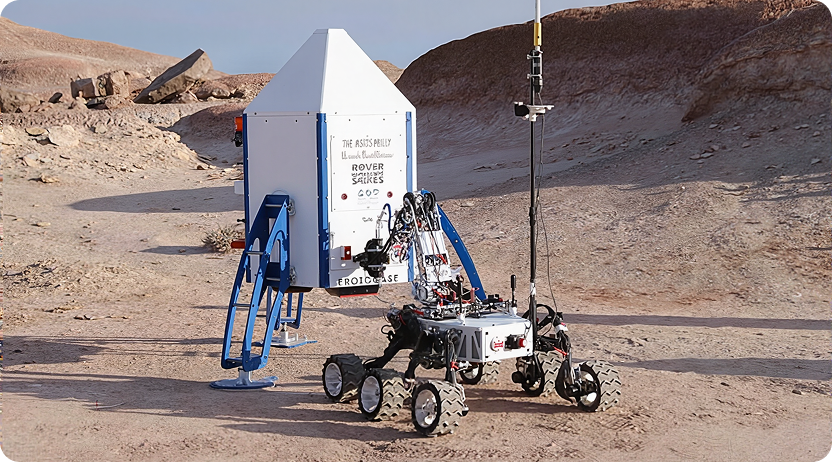
多伦多都市大学机器人团队在大学火星车挑战赛中荣获加拿大队伍第二名
多伦多都市大学机器人团队(Toronto MetRobotics,简称TMR)汇聚了众多学科领域的佼佼者,他们共同致力于设计、开发和制造具有竞争力的高性能机器人。
CubeMars赞助2024年宾厄姆顿大学机器人团队参加URC比赛
CubeMars很荣幸宣布,我们将赞助2024年宾厄姆顿大学机器人团队参加由美国宇航局(NASA)主办的University Rover Challenge(URC)比赛。URC是一个国际性的大学生机器人比赛,旨在鼓励大学生应用科学、技术、工程和数学(STEM)知识,设计、制造和操作用于探索火星的机器人。

CubeMars聚焦工业场景,以大扭矩输出轻松应对重载压力;模块化自由组装设计,可灵活集成编码器、减速机等部件,快速适配数控机床、物流线等多元需求,降低部署与维护成本。产品支持多种安装方式,适配不同空间布局需求,同时具备出色的控制精度与动态响应性能,满足工业环境中对高强度连续运行和精准运动控制的严格要求。
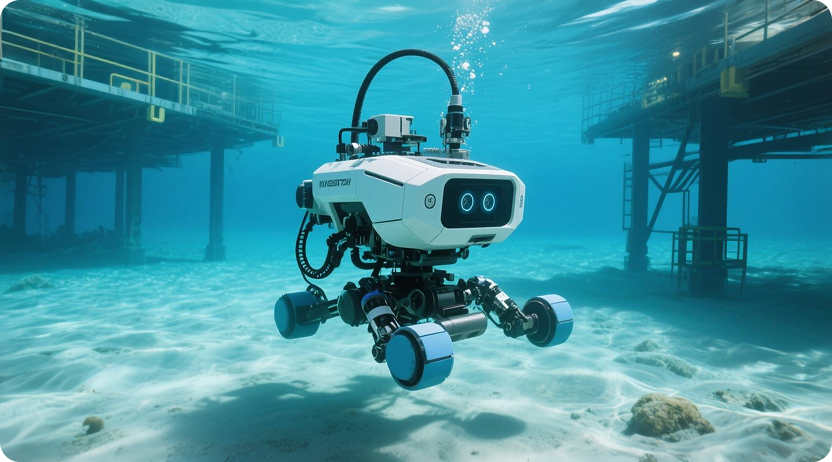
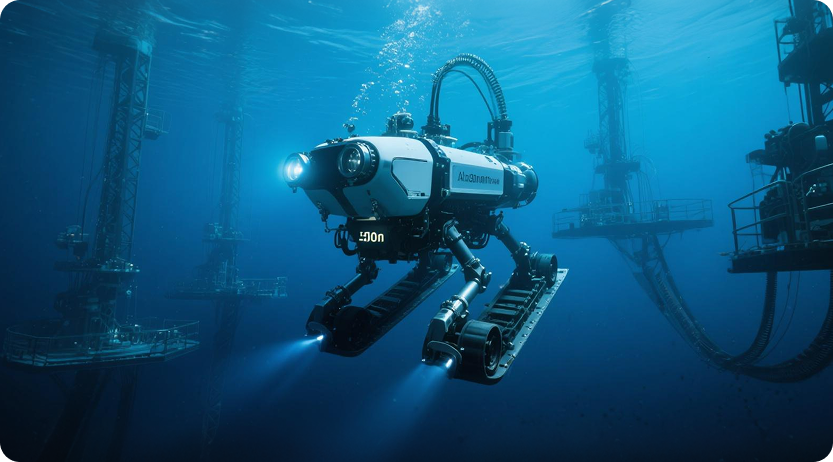
在水下机器人应用中,CubeMars推出多款专为水下环境设计的推进电机,覆盖0–350米水深范围,适配浅水作业与深海探测等不同场景需求。电机具备高防护等级、抗腐蚀结构与强劲推力,在复杂水域环境中依然保持稳定输出,广泛应用于ROV、AUV、水下作业平台等多类型水下设备。