Регистрировать

По мере того как роботы переходят от «способности двигаться» к «высокопроизводительному движению», требования к оперативности, точности и стабильности быстро растут. Будь то человекоподобные роботы, четвероногие роботы или экзоскелеты, основная задача больше не заключается просто в выполнении действий, а в достижении более естественного, более быстрого и более безопасного управления движением.
В этом процессе традиционные распределенные силовые решения постепенно обнаруживают свои явные ограничения: длинные цепи управления приводят к увеличению задержки, координация нескольких модулей повышает сложность системы, а также затрудняет стабильную реализацию алгоритмов управления высокого уровня (таких как силовое управление и управление импедансом).
Появление высокоинтегрированных исполнительных механизмов направлено именно на решение этих «системных проблем». Замыкая контур управления внутри исполнительного механизма, они значительно снижают задержку сигнала, повышают скорость реакции и значительно улучшают общую стабильность управления. Это позволяет роботам достигать более высокочастотного и точного управления движением, сохраняя равновесие и выполняя сложные действия в динамических средах.
Таким образом, растущая зависимость роботов от высокоинтегрированных исполнительных механизмов объясняется тем, что:
Узкое место производительности постепенно смещается с «уровня алгоритмов» на «уровень силовой системы».
Двигатель (обеспечивает базовое движущее усилие)
Редуктор (увеличивает выходной крутящий момент)
Драйвер (обеспечивает управление током)
Датчики (например, энкодеры для обратной связи по положению и скорости)
Алгоритмы управления (реализуют замкнутые контуры управления током/скоростью/положением)
По сравнению с традиционной раздельной структурой «двигатель + внешний драйвер + внешние датчики», высокоинтегрированный исполнительный механизм объединяет все эти функции в компактном модуле, обеспечивая:
Малозадержное локальное замкнутое управление
Более высокую степень интеграции и надежности системы
Более простую инженерную интеграцию (plug-and-play)
С инженерной точки зрения, это не только форма аппаратной интеграции, но и модернизация системной архитектуры — преобразование сложных систем управления в стандартизированные, многоразовые функциональные модули.
В современной робототехнике высокоинтегрированные исполнительные механизмы постепенно становятся основным силовым узлом. Благодаря глубокой интеграции двигателя, редуктора, драйвера и датчиков, такие исполнительные механизмы не только значительно повышают компактность и надежность системы, но и заметно снижают задержку управления и сложность системы, позволяя роботам достичь лучшего баланса между производительностью и инженерной реализацией. Проще говоря, силовая система в значительной степени определяет крутящий момент, точность управления и динамическую реакцию робота.
Именно в русле этой технологической тенденции «потолок» производительности роботов переопределяется.
По мере того как роботы переходят от «способности двигаться» к «удобству использования», истинным ограничителем становится не сама конструкция, а силовая система.
Особенно в человекоподобных роботах, четвероногих роботах и экзоскелетах исполнительный механизм должен не только «приводить в движение», но и одновременно обеспечивать:
Силовой выход
Точное управление
Динамическую реакцию
Безопасное взаимодействие
Серия AK от CubeMars — это семейство модульная силовая система (AK60 / AK70 / AK80), созданное именно в этом контексте для решения проблем традиционных решений, связанных с габаритами, задержкой и сложностью управления.
Серия исполнительных механизмов CubeMars AK — это не единичный продукт, а модульная силовая система, покрывающая различные потребности по нагрузке.
Ключевые характеристики: Легкий / Компактный / Точное управление
Применение:
Суставы небольших роботов
Образовательные и исследовательские платформы
Манипуляторы с легкой нагрузкой
Особенности:
Малые габариты, простая интеграция
Высокая точность управления
Низкое энергопотребление
Основное преимущество: Подходит для сценариев «точных движений + ограниченного пространства»
Сравнение ключевых параметров серии AK60
| Модель | Передаточное отношение | Пиковый крутящий момент | Номинальный крутящий момент | Скорость холостого хода | Вес |
| AK60-6 V3.0 KV80 | 6:1 | 9 | 3 | 320/640 | 380 |
| AK60-39 V3.0 KV80 | 39:1 | 72 | 24 | 98 | 750 |
| AK60-6 V1.1 KV80 | 6:1 | 9 | 3 | 320 | 368 |
Ключевые характеристики: Универсальный / Сбалансированный / Динамические характеристики
Применение:
Четвероногие роботы
Средние суставы роботов
Мобильные роботы
Особенности:
Сбалансированность крутящего момента и габаритов
Отличная динамическая реакция
Высокая стабильность
Основное преимущество: Подходит для сценариев «динамического движения + универсальной разработки»
Сравнение ключевых параметров серии AK70
| Модель | Передаточное отношение | Пиковый крутящий момент | Номинальный крутящий момент | Скорость холостого хода | Вес |
| AK70-10 KV100 | 10:1 | 24.8 | 8.3 | 240/480 | 521 |
| AK70-9 KV60 | 9:1 | 29.2 | 8.5 | 320 | 540 |
Ключевые характеристики: Высокая нагрузка / Высокая мощность / Сильная динамика
Применение:
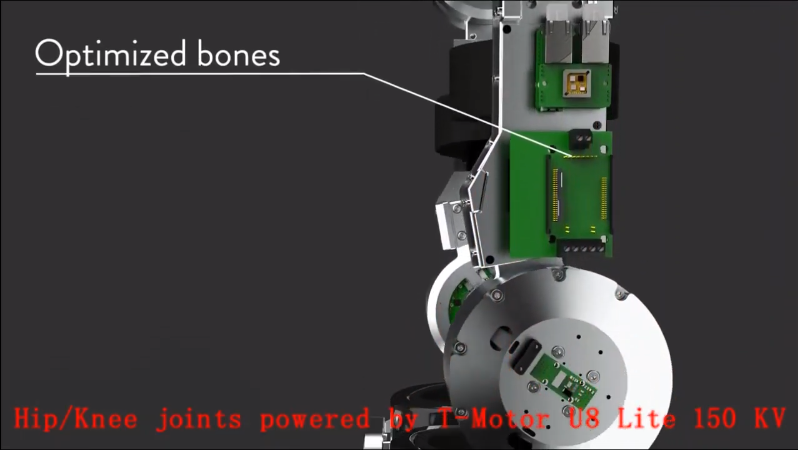
Привод тазобедренных/коленных суставов человекоподобных роботов
Системы экзоскелетов
Промышленные роботы
Особенности:
Высокий выходной крутящий момент
Поддержка сложных движений (прыжки, перенос груза)
Отличные показатели силового управления
Основное преимущество: Подходит для сценариев «несения нагрузки + высокодинамичного движения»
Сравнение ключевых параметров серии AK80
| Модель | Передаточное отношение | Пиковый крутящий момент | Номинальный крутящий момент | Скорость холостого хода | Вес |
| AK80-9 V3.0 KV100 | 9:1 | 22 | 9 | 390 | 490 |
| AK80-8 KV60 | 8:1 | 25 | 10 | 360 | 570 |
| AK80-6 KV100 | 6:1 | 12 | 6 | 800 | 485 |
1.Высокая плотность крутящего момента: Ключ к преодолению ограничений по размеру
Традиционные двигатели часто сталкиваются с ограничением «чем больше размер → тем выше крутящий момент», в то время как серия AK преодолевает это благодаря:
Высокоэффективным постоянным магнитам
Оптимизированной конструкции магнитной цепи
Повышенному коэффициенту заполнения паза и электромагнитной эффективности
Достигая: большего крутящего момента в меньшем объеме
Инженерное значение:
Снижение общего веса робота
Повышение энергоэффективности
Обеспечение большей маневренности робота
2.Векторное управление (FOC): Ключ к «плавному» движению
Серия AK использует передовые алгоритмы векторного управления, реализуя трехконтурную систему управления:
Контур тока
Контур скорости
Контур положения
Достигаемые изменения:
Пуск и останов без рывков
Плавные разгон и замедление
Высокоточное отслеживание траектории
По сравнению с традиционным управлением:
Повышенная скорость реакции (миллисекундный уровень)
Значительно улучшенная точность управления
3.Высокоразрешающая система кодирования: Точное восприятие каждого движения
Встроенные высокоточные энкодеры обеспечивают:
Обратную связь по углу в реальном времени
Высокоразрешающее определение положения
Измерение многооборотного абсолютного положения (в некоторых моделях)
Поддержка передовых методов управления:
Силовое управление
Управление импедансом
Податливое управление
4.Интегрированная структура: От «комбинации компонентов» к «системной оптимизации»
Ключевое преимущество серии AK заключается в высокой степени интеграции:
Традиционное решение:
Двигатель + Редуктор + Драйвер + Энкодер → разделены
Силовое решение CubeMars:
Интегрированный герметичный исполнительный механизм
Достигаемая практическая ценность:
Снижение задержки сигнала
Повышение стабильности системы
Упрощение механической и электрической конструкции
Значительное сокращение цикла разработки
В робототехнической индустрии «лучшие параметры» не равны «успешному применению». Истинную ценность технологии демонстрируют реальные результаты в таких областях, как медицина, соревнования и экстремальные среды.
Серия AK от CubeMars (AK60-6, AK70, AK80) уже внедрена в нескольких реальных проектах.
1.Недорогой интеллектуальный протез: Как AK60-6 меняет доступность медицинской помощи?

Предыстория проекта
Команда студентов из Непала разработала недорогой голеностопный протез (Ankle-Foot Prosthesis), чтобы решить проблему высокой стоимости и недоступности протезов в развивающихся странах.
Проблемы традиционных протезов:
Высокая стоимость
Ограниченная функциональность
Трудность имитации естественной походки
Техническое решение:
Команда использовала:
3D-печатную конструкцию (для снижения затрат)
Логику управления, основанную на движениях человека
Исполнительный механизм CubeMars AK60-6 в качестве основного привода
Ключевая роль CubeMars:
AK60-6 обеспечил в этом проекте три основные возможности:
1.Высокий крутящий момент + высокоточное управление
Поддержка движения голеностопа
Точное управление углом походки
Обеспечение походки, более близкой к естественной
2.Быстрая реакция
Следование за изменениями движений пользователя в реальном времени
Динамическая адаптация к ритму походки
Повышение стабильности ходьбы
3.Высокая надежность и долговечность
Прохождение испытаний на нагрузку и обратное ведение
Соответствие требованиям длительного использования в медицинских устройствах
Достигнутые результаты
Успешная разработка прототипа и прохождение предварительных испытаний
Значительное снижение стоимости протеза
Предложение реализуемого решения для развивающихся стран
Основная ценность:
Высокопроизводительный исполнительный механизм = Ключевой драйвер «демократизации» медицинских технологий
2.Соревнование марсоходов: Надежный привод в экстремальных условиях

Предыстория проекта:
Команда Toronto MetRobotics приняла участие в престижном международном соревновании — University Rover Challenge (URC), целью которого была разработка робота, способного работать в «марсианских условиях».
Соревнование делает акцент на:
Адаптации к экстремальному рельефу
Высокой надежности
Длительной непрерывной работе
Технические вызовы
Система марсохода должна была справляться с:
Сложным рельефом (песок, камни)
Способностью к передвижению с высокой нагрузкой
Длительной стабильной работой
Силовое решение CubeMars
CubeMars предоставил двигатели и исполнительные механизмы для робота:
Высокий выходной крутящий момент → обеспечение мощного движущего усилия
Высокая надежность конструкции → адаптация к сложным условиям
Высокая эффективность → поддержка длительных задач
Достигнутые результаты
Команда заняла второе место в Канаде на соревновании URC
Робот показал стабильную работу в сложных условиях
Основная ценность:
Высокая надежность + Высокий крутящий момент = Способность к непрерывной работе в экстремальных условиях
3.Автономное устройство для реабилитационного растяжения: Переход от «работоспособности» к «комфорту»

Предыстория проекта
Пациент Михаэль, страдающий мышечной дистрофией, совместно с командой разработал автономное устройство для растяжения икроножных мышц для ежедневных реабилитационных тренировок.
Проблемы традиционного реабилитационного оборудования:
Зависимость от ручного труда
Прерывистость тренировок
Неточность управления
Технические требования
Устройство должно было обеспечивать:
Плавное и безопасное управление движением
Длительную стабильную работу
Низкий уровень шума
Силовое решение CubeMars
Исполнительный механизм CubeMars в качестве основного привода обеспечил:
1.Плавное управление
Точная регулировка угла и скорости растяжения
Исключение рывков
2. Высокую реактивную способность
Корректировка ритма тренировки в реальном времени
Поддержка индивидуальной реабилитации
3. Низкий шум + Высокую стабильность
Повышение комфорта пациента
Поддержка длительного использования
Помог устройству стать по-настоящему «работоспособным и пригодным для длительного использования»
Достигнутые результаты
Автоматизация реабилитационных тренировок
Улучшение опыта и приверженности пациента лечению
Стимулирование развития домашнего реабилитационного оборудования
Основная ценность:
Точное управление + Стабильность = Медицинское качество для пользователя
1.Преимущества в производительности
Высокая плотность крутящего момента
Высокая скорость реакции
Высокая точность управления
2.Инженерные преимущества
Интегрированная конструкция
Простота интеграции
Сокращение цикла разработки
3.Прикладные преимущества
Охват множества сценариев (образование / промышленность / медицина)
Подтверждены реальными проектами
Роботизированные силовые системы быстро развиваются в направлении:
Более высокой удельной мощности (легче и сильнее)
Управления с меньшей задержкой (реакция в реальном времени)
Более интеллектуального управления (ИИ + силовое управление)
Более высокой стандартизации модулей (plug-and-play)
CubeMars продолжает итерации в этом направлении, способствуя переходу роботов от «реализации функций» к «оптимизации производительности».
С точки зрения развития отрасли, робототехника переходит от этапа «реализации функций» к этапу «конкуренции производительности». И в этом переходе истинным ограничителем потенциала робота становится не дизайн конструкции или алгоритмические возможности, а производительность и уровень интеграции самой силовой системы.
Серия AK от CubeMars, представленная высокоинтегрированными исполнительными механизмами, переопределяет парадигму проектирования роботизированных силовых систем:
Переход от «раздельных компонентов» к «высокой интеграции»
Переход от «способности работать» к «высокопроизводительному движению»
Переход от «сложной разработки» к «быстрому развертыванию»
С продуктовой точки зрения, серия AK формирует полную систему исполнительных механизмов:
AK60: Легкость + Высокоточное управление
AK70: Сбалансированная производительность + Динамическая реакция
AK80: Высокий крутящий момент + Способность к высоким нагрузкам
Эта продуктовая матрица не только покрывает различные потребности в нагрузке и применении, но, что более важно, унифицирует логику управления и системную архитектуру, позволяя разработчикам быстро переносить и повторно использовать наработки между различными роботизированными платформами, значительно повышая эффективность разработки.
С точки зрения инженерной практики, ценность, приносимая высокоинтегрированными исполнительными механизмами, выходит за рамки простого «улучшения параметров» и представляет собой скачок системных возможностей:
Меньшая задержка → достижение истинно реального управления
Более высокая интеграция → снижение количества точек отказа системы
Более высокая согласованность → повышение стабильности всей машины
Более простая разработка → сокращение времени вывода продукта на рынок
А в реальных приложениях, будь то недорогие медицинские протезы, марсоходы или реабилитационные устройства, эти реальные примеры доказывают одно:
Высокопроизводительные исполнительные механизмы становятся ключевой инфраструктурой для перехода роботов «из лабораторий в реальный мир»
Заглядывая в будущее, тенденции развития роботизированных силовых систем становятся все более ясными:
Более высокая удельная мощность (меньший объем, более мощный выход)
Меньшая задержка управления (миллисекундный уровень или ниже)
Более интеллектуальное управление (силовое управление + ИИ)
Более стандартизированные модули (настоящий «plug-and-play»)
В этом процессе CubeMars, постоянно совершенствуя серию AK, последовательно продвигает роботов от «способности двигаться» к «умению двигаться лучше» и затем к «умению двигаться более подобно человеку».