Crear su cuenta de CubeMars

Al evaluar un perro robot (robot cuadrúpedo), su patrón de marcha es solo una parte de la historia. El verdadero desafío radica en su capacidad para adaptarse a terrenos irregulares y mantener la estabilidad dinámica en tiempo real.
Recientemente, Arsenii Mironov, un entusiasta de la ingeniería de 15 años, construyó su propio perro robot y realizó una notable prueba de equilibrio. Colocó el robot sobre una tabla de madera inclinable, levantando gradualmente un lado para crear una pendiente. A pesar de la inclinación cambiante, el robot mantuvo una postura firme: sin deslizarse, sin volcarse, solo una estabilidad sólida.
Esta prueba no se centró únicamente en el hardware, sino que también fue una prueba de estrés para los algoritmos de control y actuadores robóticos. Cada movimiento mínimo requería:
Respuesta rápida de par
Ajuste preciso de la posición
Salida suave y controlable
Sin estos, ni siquiera las mejores estrategias de control serían suficientes para mantener el equilibrio del robot.
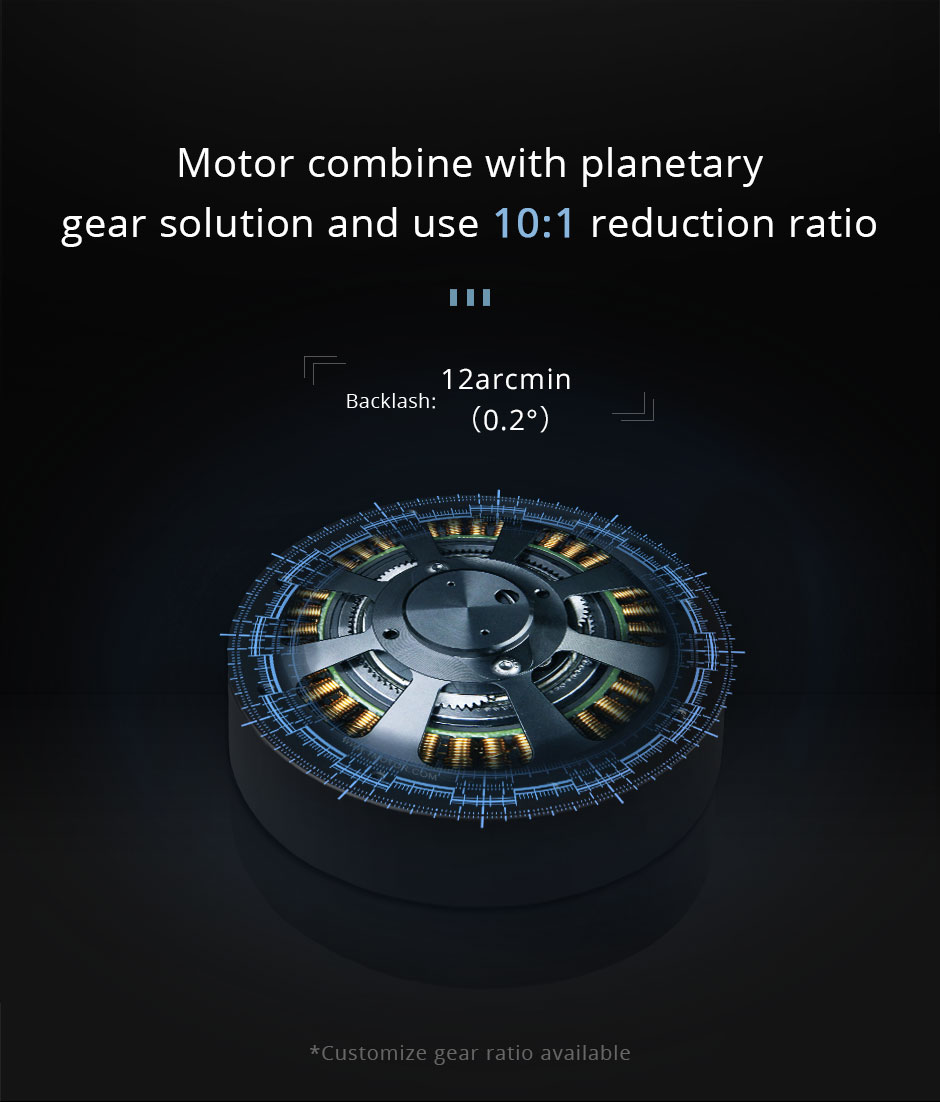
Para alimentar las 12 articulaciones de su perro robot, Arsenii eligió el CubeMars AK70-10 KV100 Actuador robótico - 24/48V,Relación 10:1, conocida por su rendimiento en aplicaciones exigentes:
Alta densidad de par: par máximo de 24,8 Nm para manejar cargas dinámicas.
Respuesta ultra-rápida: baja latencia para ajustes precisos de alta frecuencia.
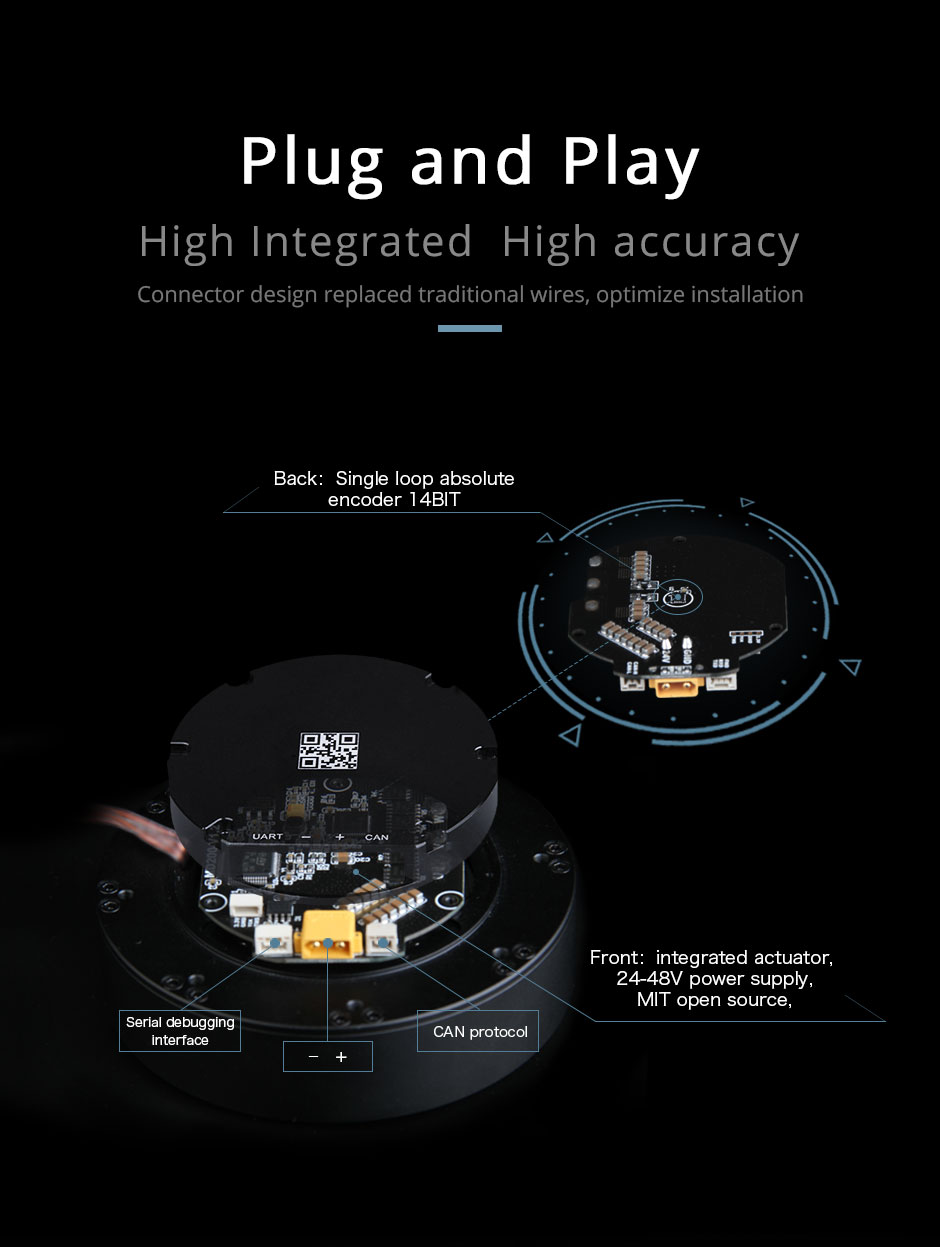
Retroalimentación de precisión: codificador de 14 bits integrado con precisión submilimétrica.
Integración compacta: motor, caja de engranajes planetaria y controlador combinados para espacios reducidos.
En la prueba de inclinación, AK70-10 KV100 el actuador robótico actuó como músculos robóticos con reacciones a nivel reflejo. Cuando el equilibrio del robot se desplazaba ligeramente, los motores del perro robot se ajustaba al instante, devolviéndolo a una posición estable. Esta sinergia en lazo cerrado entre el controlador y el actuador es la clave para dominar terrenos dinámicos.
En CubeMars, nos enorgullece ver a jóvenes innovadores como Arsenii Mironov llevando los límites de lo que es posible en robótica. Estamos dedicados a proporcionar actuadores de alto rendimiento para perros robots, cuadrúpedos y más, empoderando a la próxima generación de creadores.
.png)

