Crear su cuenta de CubeMars











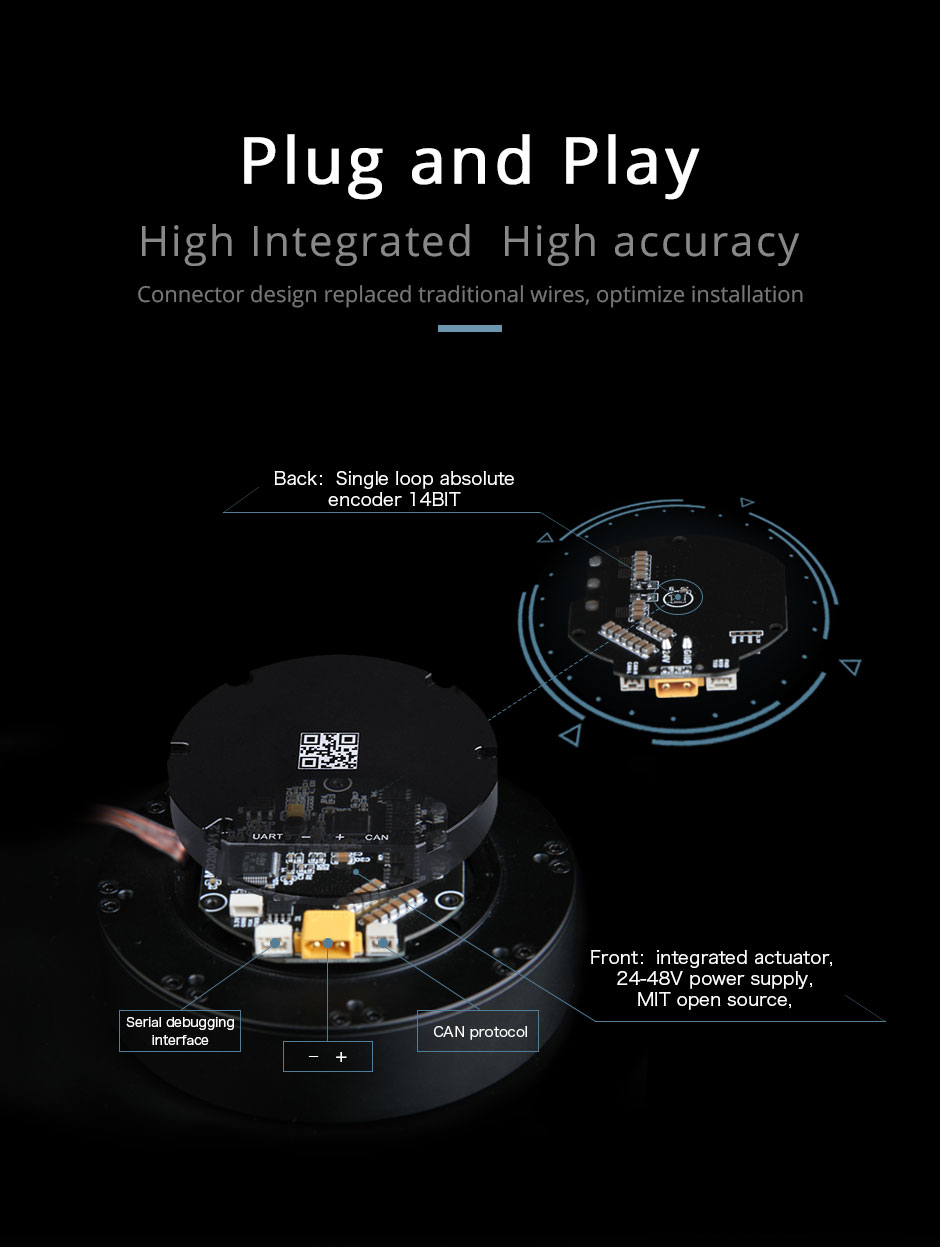
El actuador robótico CubeMars AK70-10 KV100 integra un motor DC sin escobillas de alto rendimiento, un reductor planetario 10:1, la placa de control y el encoder en una unidad compacta y fácil de instalar. Gracias a la reducción 10:1, proporciona una mayor salida de par manteniendo tiempos de respuesta rápidos. El módulo admite control multibucle (posición, velocidad, par y modo híbrido MIT), incorpora conectores plug-and-play y identificación automática de parámetros PID, e incluye protecciones integradas contra sobrecorriente, sobretensión/subtensión y sobretemperatura, garantizando un funcionamiento estable en entornos exigentes.
Dimensiones del motor: Ф89*50.25mm
Peso del motor: 521g
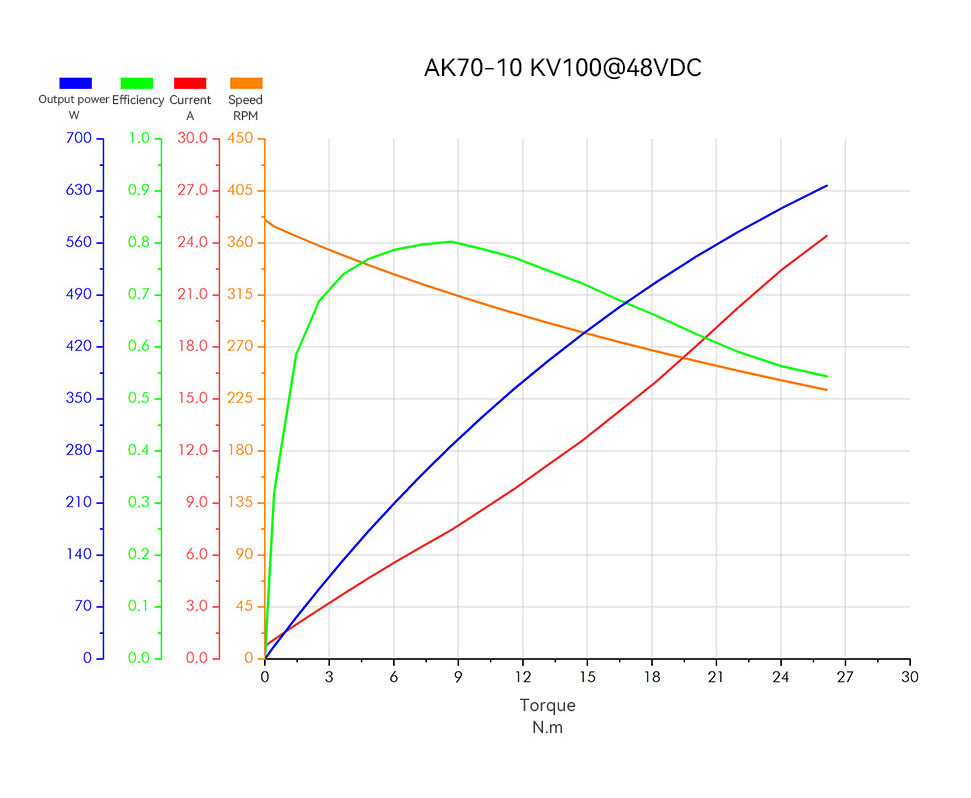
Par máximo: 24.8Nm
Velocidad en vacío: 480rpm
Diseño integrado: Integración todo-en-uno del motor, el reductor planetario, el controlador y el encoder, reduciendo significativamente la complejidad del sistema
Alta densidad de par: Par nominal de hasta 8,3 Nm y par pico de 24,8 Nm, adecuado para aplicaciones de carga media a alta
Retroalimentación de alta precisión: Encoder magnético de 14 bits que permite un control preciso de posición y velocidad
Modos de control flexibles: Compatible con control de posición, velocidad, par y modo híbrido MIT
Protección integral: Protección integrada contra sobrecorriente, sobretensión/subtensión y sobretemperatura, garantizando fiabilidad a largo plazo
Amplio rango de aplicaciones: Diseñado para exoesqueletos, robots cuadrúpedos, brazos robóticos colaborativos y otros sistemas robóticos dinámicos
Actuador AK70-10 KV100 (incluye de serie la placa de control) ×1
Cable de alimentación ×1
Cable serie CAN ×1
R-link V2.0
Placa de control V2.1
Kit de cableado V2.0



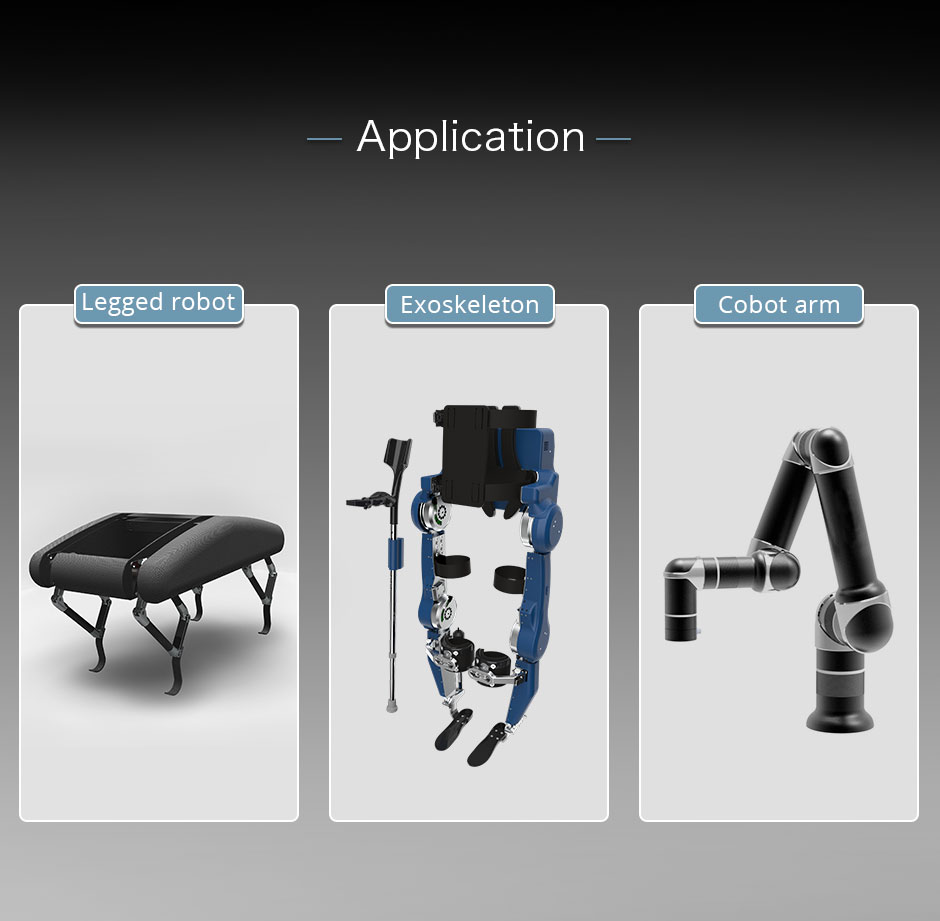

| Aplicación | Robot con patas,Exoesqueleto,AGV | Par pico Nm | 24.8 |
| Método de accionamiento | FOC | Corriente pico (ADC) | 23.2 |
| Temperatura de funcionamiento | -20℃~50℃ | Kv (rpm/V) | 100 |
| Tipo de devanado | Delta | Kt (Nm/A) | 0.123 |
| Clase de aislamiento | H | Ke (V/krpm) | 11.2 |
| Tensión soportada de aislamiento | 1000V 5mA/2s | Resistencia entre fases (mΩ) | 272 |
| Resistencia de aislamiento | 1000V10MΩ | Inductancia entre fases (μH) | 113 |
| Número de fases | Trifásico | Inercia del rotor (gcm²) | 753.4788 |
| Pares de polos | 21 | Constante del motor (Nm/√W) | 0.24 |
| Relación de reducción | 10:01 | Constante de Tiempo Mecánica (ms) | 0.74 |
| Par de arrastre inverso (Nm) | 0.48 | Constante de tiempo eléctrica ms | 0.42 |
| Juego mecánico (arcmin) | 0.12 | Peso (g) | 621 |
| Sensor de temperatura | NTC MF51B 103F3950 | Relación máxima par/peso (Nm/kg) | 47.6 |
Ruido dB(a 65CM del motor) | 58 | Conector CAN | A1257WR-S-4P |
| Carga dinámica básica nominal Cr (N) | 2000 | Conector UART | A1257WR-S-3P |
| Carga estática básica nominal Cor (N) | 2520 | Conector de alimentación | XT30PW-M |
| Tensión nominal (V) | 24/48 | Tipo de codificador de bucle interno | Magnetic encoder |
| Par nominal (Nm) | 8.3 | Resolución del codificador de anillo interno | 14bit |
| Velocidad nominal (rpm) | 148/310 | Tipo de codificador de anillo externo | - |
| Corriente nominal (ADC) | 7.2 | Resolución del codificador del anillo exterior | - |
| Número de codificadores | 1 | Número de modelo | Ak70-10 |
| categoría | Modelo | Tensión nominal (V) | Potencia nominal (W) | Par nominal (Nm) | Corriente nominal (A) | Velocidad nominal (RPM) | Par pico (Nm) | Corriente pico (A) | Velocidad sin carga (RPM) | Relación de reducción | Peso (G) | Tamaño (diámetro × longitud) MM | Placa driver | Codificador | Operación |
| Actuador robótico serie AK | AK10-9 V3.0 KV60 | 48 | 442 | 18 | 10.7 | 235 | 53 | 31.9 | 320 | 9:1 | 940 | Ф98*61.7 | Yes | Doble |  |
| Actuador robótico serie AK | AK10-9 V2.0 KV60 | 24/48 | 430 | 18 | 10.6 | 109/228 | 48 | 29.8 | 160/320 | 9:1 | 960 | Ф98*61.7 | Yes | Doble | |
| Actuador robótico serie AK | AK80-9 V3.0 KV100 | 48 | 368 | 9 | 12 | 390 | 22 | 28 | 570 | 9:1 | 490 | Ф98*38.5 | Yes | Simple | |
| Actuador robótico serie AK | AK80-8 KV60 | 48 | 230 | 10 | 6.9 | 243 | 25 | 21 | 360 | 8:1 | 570 | Ф98*43.9 | Yes | Doble | |
| Actuador robótico serie AK | AK45-36 V3.0 KV80 | 24 | 33.5 | 8 | 2 | 40 | 24 | 6.5 | 52 | 36:1 | 349 | φ55*56.5 | Yes | Doble | |
| Actuador robótico serie AK | AK45-10 V3.0 KV75 | 24 | 39 | 2.5 | 1.9 | 120 | 7 | 5 | 180 | 10:1 | 262 | φ53*45.2 | Yes | Doble | |
| Actuador robótico serie AK | AK40-10 V3.0 KV170 | 24 | 50 | 1.3 | 2.7 | 370 | 4.1 | 7.3 | 435 | 10:1 | 190 | φ53*40.2 | Yes | Doble | |
| Actuador robótico serie AK | AK80-6 KV100 | 48 | 340 | 6 | 9.7 | 603 | 12 | 20 | 800 | 6:1 | 485 | Ф98*38.5 | Yes | Simple | |
| Actuador robótico serie AK | AK80-64 KV80 | 24/48 | 220 | 48 | 7 | 23/48 | 120 | 19 | 37/75 | 64:1 | 850 | Ф98*61.9 | Yes | Simple | |
| Actuador robótico serie AK | AK70-10 KV100 | 24/48 | 230 | 8.3 | 7.2 | 148/310 | 24.8 | 23.2 | 240/480 | 10:1 | 521 | Ф89*50.25 | Yes | Simple | |
| Actuador robótico serie AK | AK70-9 V3.0 KV60 | 48 | 231 | 8.5 | 6.25 | 260 | 29.2 | 23.8 | 320 | 9:1 | 540 | Ф89*49 | Yes | Doble | |
| Actuador planetario de eje hueco serie AKH | AKH70-48 V1.0 KV41 | 48 | 217 | 74 | 6 | 28 | 222 | 21 | 35 | 48:1 | 1396 | φ90*81.5 | Yes | Doble | |
| Actuador robótico serie AK | AK60-6 V3.0 KV80 | 24/48 | 74 | 3 | 3.8 | 233/490 | 9 | 10.3/11.2 | 320/640 | 6:1 | 380 | Ф79*43 | Yes | Simple | |
| Actuador robótico serie AK | AK60-39 V3.0 KV80 | 48 | 176 | 24 | 4.5 | 70 | 72 | 17 | 98 | 39:1 | 750 | Ф79*67 | Yes | Doble | |
| Actuador robótico serie AK | AK60-6 V1.1 KV140 | 24 | 130 | 3 | 6.5 | 420 | 9 | 22.7 | 560 | 6:1 | 368 | Ф79*39.5 | Yes | Simple | |
| Actuador robótico serie AK | AK45-36 KV80 | 24 | 33 | 8 | 2 | 40 | 24 | 6.5 | 52 | 36:1 | 340 | φ55*54 | Yes | Simple | |
| Actuador robótico serie AK | AK45-10 KV75 | 24 | 39 | 2.5 | 2.1 | 150 | 7 | 5 | 180 | 10:1 | 260 | Ф53*43 | Yes | Simple | |
| Actuador robótico serie AK | AK40-10 KV170 | 24 | 59 | 1.3 | 2.7 | 370 | 4.1 | 7.3 | 435 | 10:1 | 185 | φ53*37 | Yes | Simple | |
| Motor de accionamiento cuasi directo de la serie AKE | AKE90-8 KV35 | 48 | 700 | 55 | 21 | 120 | 170 | 72 | 210 | 8:1 | 1400 | Ф107.5*43.5 | No | |
|
| Motor de accionamiento cuasi directo de la serie AKE | AKE80-8 KV30 | 48 | 188 | 12 | 4.8 | 150 | 30 | 12 | 195 | 8:1 | 570 | Ф87*32 | No | |
|
| Motor de accionamiento cuasi directo de la serie AKE | AKE60-8 KV80 | 24 | 95 | 5 | 4.8 | 180 | 12.5 | 12 | 240 | 8:1 | 260 | Ф69*25 | No | |
|
| Actuador robótico serie AKA | AKA10-9 KV60 | 48 | 205 | 18 | 10.6 | 109 | 53 | 32 | 320 | 9:1 | 1060 | ∅100*70 | Yes | Simple | |
| Actuador robótico serie AKA | AKA60-6 KV80 | 24/48 | 62 | 3 | 4 | 200/400 | 9 | 11.2 | 320/640 | 6∶1 | 460 | Ф80*51.2 | Yes | Simple | |
| Actuador planetario de eje hueco serie AKH | AKH70-16 V1.0 KV41 | 48 | 245 | 26 | 6.5 | 90 | 85 | 23 | 105 | 16:1 | 879 | φ90*60.5 | Yes | Doble | |



