Registrieren

Nikodem Bartnik entwickelt ein leistungsfähiges Robotergehäuse mit CubeMars-Treibern der AK-Serie und Arduino
Nachdem er versucht hatte, einige AK80-9 KV100 Aktuatoren von CubeMars in ein Roboterarmprojekt zu integrieren, sah sich der YouTube-Nutzer Nikodem Bartnik gezwungen, sich einer anderen Art von Projekt zuzuwenden: einem universellen Roboterchassis/einer universellen Roboterplattform. Durch die Verwendung dieser leistungsstarken, hochpräzisen Motoren ist sein Roboter sowohl schnell als auch genau, wenn er sich über den Boden bewegt.
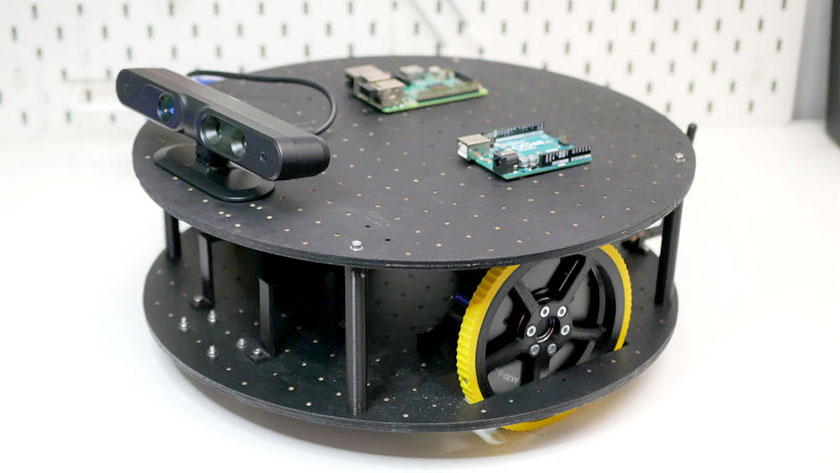
Nachdem er mit Hilfe einer CNC-Fräse eine flache Platte aus einem Stück Sperrholz geschnitten hatte, montierte Bartnik zwei Motoren und brachte an jedem Motor ein Rad an. Zur Steuerung der Motoren verwendete er einen Arduino Uno und baute eine eigene Leiterplatte, um CAN-Bus-Signale zwischen dem Uno und den beiden Motoren zu übertragen. Die Stromversorgung erfolgt über zwei LiPo-Akkus mit insgesamt etwa 24 Volt.

Derzeit ist der Roboter im Wesentlichen ein ferngesteuertes Auto, das auf Befehle reagiert, die es von außen erhält. Für Bartniks Projekt verwendete er einen zusätzlichen Uno, der über USB mit einem Laptop verbunden war, und ein nRF24-Funk-Transceivermodul, um Daten drahtlos an das nRF24-Modul des Roboters zu senden. Außerdem schrieb er ein Python-Skript, mit dem sich die Bewegungsgeschwindigkeit des Roboters einstellen und die Pfeiltasten nach unten drücken lassen, was dann in eine Richtungsbewegung umgewandelt wird.
Für weitere Informationen können Sie sich Bartniks Video unten ansehen oder seinen Projektcode und seine Designdateien abrufen.


