Registrieren

Im Bereich der Robotikentwicklung stellt das Design eines Robotersarms mit sechs Freiheitsgraden eine Brücke zwischen Theorie und praktischer Anwendung dar. Unabhängig davon, ob das Ziel eine präzisionsorientierte Desktop-Laborlösung oder eine industrielle Anwendung mit hoher Nutzlast und großer Reichweite ist, liegt die zentrale Herausforderung darin, die Kompromisse zwischen Endeffektor-Nutzlast, strukturellem Eigengewicht und Gelenkausgangsdrehmoment auszubalancieren.
Die Auswahl von Aktuatoren ist längst nicht mehr nur eine Frage der Wahl eines einzelnen Motors; sie bestimmt direkt die dynamischen Grenzen des Systems, die Regelbandbreite und die Integrationseffizienz. Dieser Artikel analysiert systematisch die Logik hinter der Aktuatorauswahl für Robotersysteme im Vollmaßstab und zeigt, wie eine wissenschaftliche Strategie zur Leistungsaufteilung auf Gelenkebene aufgebaut werden kann.
Mit dem Übergang von einfachen Demonstrationsmodellen hin zu realen Anwendungen steigt die Systemkomplexität von Roboterarmen rapide an. Entwickler müssen sich nicht mehr nur darauf konzentrieren, ob sich der Arm „bewegen kann“, sondern auch darauf, ob er „stabil, effizient und steuerbar“ ist. Die folgenden drei Problemtypen stellen dabei die zentralen Herausforderungen dar, mit denen nahezu alle mittelgroßen und großen Roboterarme konfrontiert sind.
Drehmomentverstärkung durch den Hebeleffekt
Ein Roboterarm ist im Wesentlichen ein typisches mehrstufiges Hebelsystem. Mit zunehmender Reichweite vergrößert sich der Abstand zwischen Nutzlast und Gelenken, wodurch sich das Drehmoment erheblich verstärkt. Noch entscheidender ist, dass dieser Anstieg nicht durch einen einzelnen Faktor verursacht wird.
Einerseits verstärkt eine größere Armlänge direkt das durch die Nutzlast erzeugte Drehmoment; andererseits erfordert die Sicherstellung der strukturellen Steifigkeit häufig dickere oder verstärkte Armsegmente, wodurch das Eigengewicht weiter zunimmt. Das bedeutet, dass die proximalen Gelenke nicht nur die Last am Endeffektor, sondern auch das kumulative Gewicht des gesamten Roboterarms tragen müssen.
In der ingenieurtechnischen Praxis äußert sich dieser Effekt typischerweise wie folgt:
Ein Motor, der in der frühen Entwurfsphase ausreichend erscheint, kann nach vollständiger Montage und maximaler Ausladung unzureichendes Drehmoment, schwerfälligen Betrieb oder sogar die Unfähigkeit zeigen, die Last anzuheben.
Dynamische Lasten und Trägheitseinflüsse
Statische Lasten sind nur ein Teil des Problems. In praktischen Anwendungen arbeiten Roboterarme selten über längere Zeit im stationären Zustand; die meisten Aufgaben beinhalten häufige Starts, Stopps und Richtungswechsel.
Während dieser dynamischen Prozesse müssen die Gelenke zusätzlich die durch Beschleunigung und Verzögerung verursachten Trägheitseffekte überwinden. Insbesondere bei hohen Geschwindigkeiten oder großen Lasten sind diese momentanen Belastungen oft deutlich höher als unter statischen Bedingungen.
Typische Erscheinungsformen sind:
Ruhiger Betrieb im Leerlauf, jedoch deutliche Verzögerungen, Vibrationen oder Nachführfehler unter Last;
Stöße bei schnellen Stopps, die zu mechanischen Schwingungen führen und sogar Lebensdauer und Zuverlässigkeit beeinträchtigen können.
Werden dynamische Faktoren in der Auswahlphase nicht ausreichend berücksichtigt, entsteht häufig eine Situation, in der das System „theoretisch funktioniert, praktisch jedoch nicht einsetzbar ist“.
Kumulative Verstärkung der Endeffektor-Genauigkeit
Die Genauigkeit eines Roboterarms hängt nicht ausschließlich von der Leistung einzelner Gelenke ab, sondern von der kumulativen Fehlerkette des gesamten Antriebssystems.
Jedes Gelenk weist ein gewisses Maß an Spiel, elastischer Verformung und Regelabweichung auf. Bei kurzen Armen fallen diese Fehler möglicherweise kaum auf, doch mit zunehmender Reichweite werden sie schrittweise verstärkt und führen schließlich zu erheblichen Positionsfehlern am Endeffektor.
In der Praxis äußert sich dies typischerweise wie folgt:
Verringerte Wiederholgenauigkeit
Abweichungen in der Endeffektor-Trajektorie
Instabilität bei kraftgeregelten oder kontaktbasierten Aufgaben
Insbesondere bei Anwendungen, die präzise Manipulation erfordern – wie Montage, Greifen oder Mensch-Roboter-Kollaboration – wirkt sich diese Fehlerverstärkung direkt auf die Nutzbarkeit des Systems aus.
Basierend auf Lastanforderungen und Anwendungsgrenzen lassen sich Aktuatorlösungen in vier Hauptansätze unterteilen:
Aktuatorarchitektur | Hauptvorteile | Technische Einschränkungen | Empfohlener Lastbereich |
Integrierte Servo-/Schrittmotorsysteme | Sehr geringe Kosten, kurze Entwicklungszeit | Geringe Leistungsdichte, begrenzte Lebensdauer, keine transparente Kraftregelung | < 2 kg (Bildung / Consumer-Bereich) |
Integrierte Robotik-Aktuatoren | Hohe Drehmomentdichte, sehr kompakte Bauweise, vereinfachte Busverkabelung | Höhere Stückkosten im Vergleich zu modularen Lösungen | 2 kg – 20 kg (kollaborative / mobile Roboter) |
Traditionelle Industrie-Servos + RV-/Harmonic-Drive-Getriebe | Extrem hohe Steifigkeit, hohe Reife, geeignet für Hochleistungsanwendungen | Systemredundanz, komplexe Verkabelung, hohes Gewicht | 20 kg – 500 kg+ (industrielle Fertigung) |
Quasi-Direktantriebs-Aktuatoren | Hohe Bandbreite, hervorragende Stoßfestigkeit und Kraftfeedback | Begrenztes kontinuierliches Hochdrehmoment | Geschickte Hände, Gelenke von Laufrobotern |
In einem typischen 6-DOF-Roboterarmsystem unterscheiden sich die Rollen der einzelnen Gelenke innerhalb der Leistungskette erheblich. Vom Basisgelenk bis zum Endeffektor nimmt das erforderliche Drehmoment schrittweise ab, während die Geschwindigkeitsanforderungen steigen und die Empfindlichkeit gegenüber Trägheit zunimmt. Daher sollten Aktuatoren nicht einheitlich ausgewählt, sondern entsprechend der Gelenkposition hierarchisch konfiguriert werden.
Basis- und Schultergelenk (Proximales Gelenk)
Diese Ebene bildet den Ausgangspunkt der Leistungskette und fungiert als „Drehmomentzentrum“ des gesamten Systems. Ihre Hauptaufgabe besteht darin, das maximale Drehmoment aus Eigengewicht und Nutzlast aufzunehmen und gleichzeitig strukturelle Stabilität sicherzustellen.
In der Praxis bestimmt diese Ebene oft die grundlegende Tragfähigkeit des Roboterarms. Ist die Auswahl hier unzureichend, können selbst leistungsstarke Gelenke in anderen Bereichen das Gesamtdefizit nicht ausgleichen.
Wichtige Auswahlkriterien:
Kontinuierliches Drehmoment statt nur Spitzendrehmoment
Steifigkeit und Stoßfestigkeit des Getriebes
Thermische Stabilität und Leistungsabfall im Dauerbetrieb
Ziel dieser Ebene ist es, sicherzustellen, dass der Roboterarm „die Last heben, halten und langfristig stabil betreiben kann“.
Ellbogen- und Mittelgelenke (Intermediate Power Level)
Die Mittelgelenke bilden die zentrale Bewegungseinheit des Roboterarms und übernehmen den Großteil der Trajektorienverfolgung sowie der Lastübertragung. Im Vergleich zu proximalen Gelenken sind hier höhere dynamische Anforderungen gegeben.
In der Praxis stellt diese Ebene oft die größte Herausforderung bei der Systemabstimmung dar. Es gilt, ausreichendes Drehmoment sicherzustellen und gleichzeitig Verzögerungen durch zu hohe Untersetzungen zu vermeiden.
Auswahlfokus:
Verhältnis zwischen Drehmoment und Drehzahl
Dynamische Reaktionsfähigkeit und Regelstabilität
Konsistente Leistung unter unterschiedlichen Lastbedingungen
Diese Ebene bestimmt direkt die Bewegungsqualität des Roboterarms – insbesondere „Laufruhe und Steuerbarkeit“.
Handgelenk und Endeffektor (Distales Gelenk)
Das distale Gelenk befindet sich am Ende des Roboterarms und fungiert als „Sensibilitätszentrum“ des Systems. Seine Masse wird durch vorgelagerte Gelenke verstärkt und beeinflusst so die Gesamtleistung.
Ist der Endeffektor zu schwer, erhöht sich die Belastung für Ellbogen- und Schultergelenke erheblich und die Reaktionsgeschwindigkeit sinkt.
Daher liegt der Fokus hier nicht auf höherem Drehmoment, sondern auf geringer Trägheit und schneller Reaktion.
Prioritäten bei der Auswahl:
Leichtbau und kompakte Konstruktion
Hohe Leistungsdichte
Hohe Reaktionsgeschwindigkeit und Regelbandbreite
Mit der Weiterentwicklung von Robotersystemen von experimentellen Validierungen hin zu realen Anwendungen verschiebt sich das gesamte Designparadigma von der traditionellen Architektur „separater Motor + Getriebe + Treiber“ hin zu stärker integrierten Lösungen auf Gelenkebene.
In diesem Kontext werden integrierte Aktuatoren zunehmend zur bevorzugten Wahl für Engineering-Teams. Der entscheidende Wandel liegt nicht nur in der strukturellen Integration, sondern in einer Veränderung der Designlogik: von der „Komponentenauswahl“ hin zur „Leistungsdefinition auf Gelenkebene“.
Reduzierte Systemkomplexität steigert die Entwicklungseffizienz
In konventionellen Designs erfordert jedes Gelenk in der Regel die separate Auswahl und Integration von Motor, Getriebe, Encoder, Treiber sowie mechanischen Befestigungs- und Ausrichtungsstrukturen.
Diese verteilte Architektur bringt häufig eine Reihe technischer Herausforderungen mit sich, darunter:
Kumulierte mechanische Ausrichtungsfehler während der Montage
Hohe Komplexität bei Verkabelung und Schnittstellendesign
Verlängerte Systemabstimmungs- und Debugging-Zyklen
Schwierigkeiten bei der Gewährleistung von Konsistenz zwischen verschiedenen Komponenten
Im Gegensatz dazu integrieren integrierte Aktuatoren diese Funktionen in einer einzigen Gelenkeinheit und reduzieren dadurch die Gesamtkomplexität des Systems erheblich.
Dadurch können Entwickler ihren Fokus von der Integration und Abstimmung mehrerer Komponenten hin zur Optimierung der Bewegungsleistung und Regelstrategien auf Gelenkebene verlagern.
Drehmomentdichte und strukturelle Effizienz werden zu Schlüsselkennzahlen
Bei einem 6-DOF-Roboterarm variieren die Lastanforderungen erheblich zwischen den einzelnen Gelenken:
Distale Gelenke: Fokus auf geringe Trägheit und schnelle Reaktion
Mittelgelenke: Balance zwischen Drehmoment und dynamischer Leistung
Proximale Gelenke: hoher statischer Drehmomentbedarf und strukturelle Tragfähigkeit
Innerhalb dieser hierarchischen Struktur liegt der Vorteil integrierter Aktuatoren darin, dass sie die gesamte kinematische Kette durch unterschiedliche Drehmomentklassen abdecken können.
Von leichten distalen Gelenken bis hin zu hochbelasteten Basisgelenken ermöglichen sie eine durchgängige technische Verteilung, ohne auf komplexe externe Getriebesysteme oder maßgeschneiderte Übertragungsmechanismen angewiesen zu sein. In der Praxis lässt sich diese Struktur anhand mehrerer typischer Gelenkkonfigurationen verstehen:
Leichter Endeffektor und hochdynamische Gelenke
Dieser Bereich entspricht hauptsächlich dem Endeffektor oder der Handgelenkstruktur des Roboterarms. Das Hauptziel besteht darin, die Trägheit zu reduzieren, die dynamische Reaktionsfähigkeit zu verbessern und die Belastung der vorgelagerten Gelenke zu minimieren.
Repräsentiert durch Modelle wie AK40-10 KV170 und AK45-10 KV75, zeichnen sich diese Aktuatoren durch hohe Drehzahlen und geringe rotatorische Trägheit aus und eignen sich besonders für Endgelenke mit schnellen Trajektorien oder hochfrequenten Anpassungen.
In realen Systemen beeinflusst diese Ebene direkt das „Bewegungsgefühl“ und die Regelbandbreite des Roboters. Ist die Masse des Endeffektors zu hoch, verschlechtert sich die Dynamik deutlich – selbst wenn die vorgelagerten Gelenke ausreichend Drehmoment liefern.
Daher wird bei der Auslegung von 6-DOF-Roboterarmen für Endgelenke in der Regel Leichtbau und hohe Dynamik priorisiert, anstatt maximales statisches Drehmoment anzustreben.

Mittelgelenke und die primäre Bewegungskette
Dieser Bereich stellt die Hauptarbeitszone des Antriebssystems dar und ist für den Großteil der Trajektorienausführung sowie der Lastübertragung verantwortlich.
Typische Konfigurationen umfassen AK70-9 KV60 und AK80-9 V3.0 KV100, die ein ausgewogenes Verhältnis zwischen Drehmoment und Geschwindigkeit bieten und sich für Ellbogen- und Zwischenachsen eignen.
In dieser Ebene verschiebt sich der Fokus von der reinen Drehmomentsteigerung hin zur Sicherstellung stabiler und konsistenter Regelperformance unter variierenden Last- und Dynamikbedingungen.

Hochlast-Schultergelenke und Basisantrieb
Dieser Bereich ist für die Aufnahme des gesamten strukturellen Drehmoments und der statischen Lasten verantwortlich und bildet die Grundlage des gesamten Antriebssystems.
In der Praxis wird der AK10-9 V3.0 KV60 häufig für proximale Gelenke mit höherem Leistungsbedarf eingesetzt, während der AKH70-48 V1.0 KV41 besser für hochbelastete Basisgelenke oder Langarmstrukturen geeignet ist, bei denen hohes Drehmoment und hohe Untersetzung erforderlich sind.

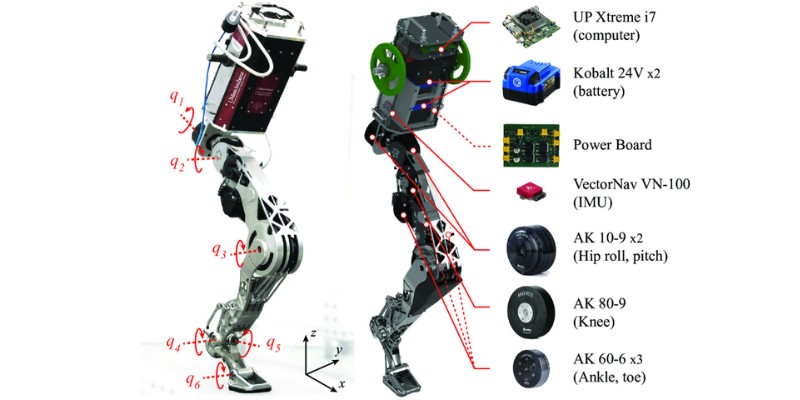
Der AK10-9 V2.0 KV60 wird ebenfalls in Basisachsen von mittel- bis hochbelasteten Robotern eingesetzt, insbesondere wenn ein Gleichgewicht zwischen Drehmoment und kompakter Bauweise erforderlich ist. Beispielsweise nutzt ein sechsachsiger Roboterarm des DIODE-Teams der Donghua-Universität zwei AK10-9 V2.0 KV60 Aktuatoren.
Der zentrale Wert dieses hierarchischen Ansatzes besteht darin, das Design von Roboterarmen von der „Einzelmotorauswahl“ hin zu einem „Problem der Leistungsaufteilung auf Gelenkebene“ zu transformieren.
Entwickler können Aktuatoren direkt basierend auf Gelenkposition und Lastanforderungen auswählen und passende Drehmomentbereiche zuweisen. Dies reduziert die Unsicherheit im Antriebsdesign erheblich und verbessert die Systemkonsistenz sowie die Vorhersagbarkeit.
Die Auslegung des Antriebssystems eines 6-DOF-Roboterarms ist im Kern ein Problem der Drehmomentverteilung und strukturellen Optimierung auf Gelenkebene. Mit zunehmender Reichweite und Nutzlast bestimmen Hebeleffekt, Trägheit und Struktursteifigkeit die Leistungsgrenzen.
In der Praxis ist die Abschätzung statischer und dynamischer Lasten auf Basis vereinfachter Modelle entscheidend. Gleichzeitig erfordert die unterschiedliche Funktion der Gelenke eine hierarchische Auslegung: geringes Trägheitsmoment am Endeffektor, ausgewogene Leistung im Mittelbereich und hohe Tragfähigkeit an Basis und Schulter.
Integrierte Aktuatoren reduzieren die Systemkomplexität erheblich und verbessern Konsistenz sowie Entwicklungseffizienz. Im Zuge von Modularisierung und Leichtbau werden sie zunehmend zum Standard in der 6-DOF-Roboterarm-Entwicklung.
Insgesamt sollte die Aktuatorauswahl auf Nutzlast, Reichweite und Bewegungsanforderungen basieren und als systemweite Optimierungsaufgabe betrachtet werden, um eine zuverlässige und effiziente Roboterarmkonstruktion zu gewährleisten.