Créer votre compte CubeMars













Le moteur de nacelle GL35 KV100 est un moteur brushless DC conçu par CubeMars spécifiquement pour les nacelles et les plateformes rotatives de haute précision. Il se distingue par sa conception compacte, sa structure légère, son arbre creux, son très faible couple d’encochage et sa compatibilité avec les contrôleurs de nacelle AlexMos. Il offre un fonctionnement fluide tout en réduisant la consommation d’énergie. Son large trou central facilite le passage des câbles ou l’intégration de bagues collectrices, ce qui le rend idéal pour les applications nécessitant une rotation continue et la transmission de signaux, telles que les nacelles de caméras, les têtes de balayage radar et les modules rotatifs exigeant une grande réactivité et une haute précision.
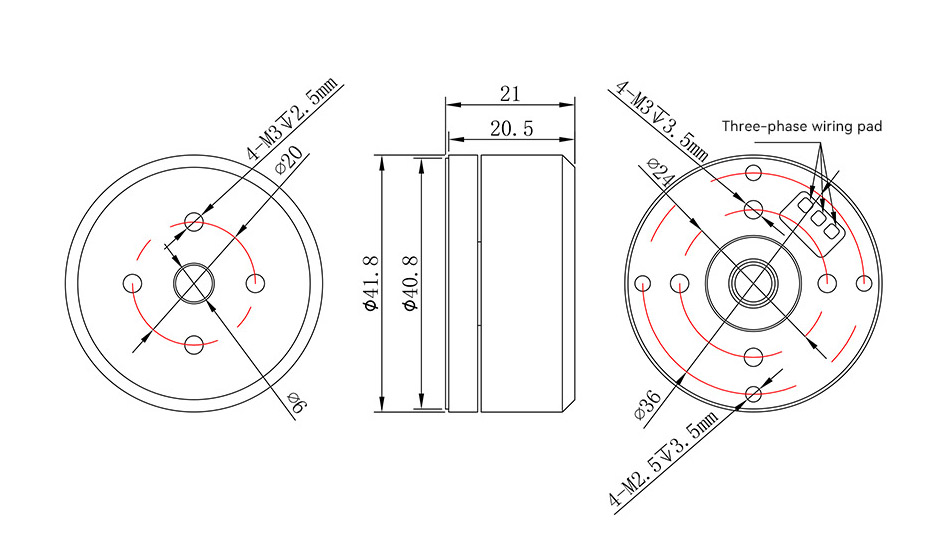
Dimensions du moteur: Ф41.8*21mm
Diamètre du trou traversan: 6mm
Poids du moteur: 90g
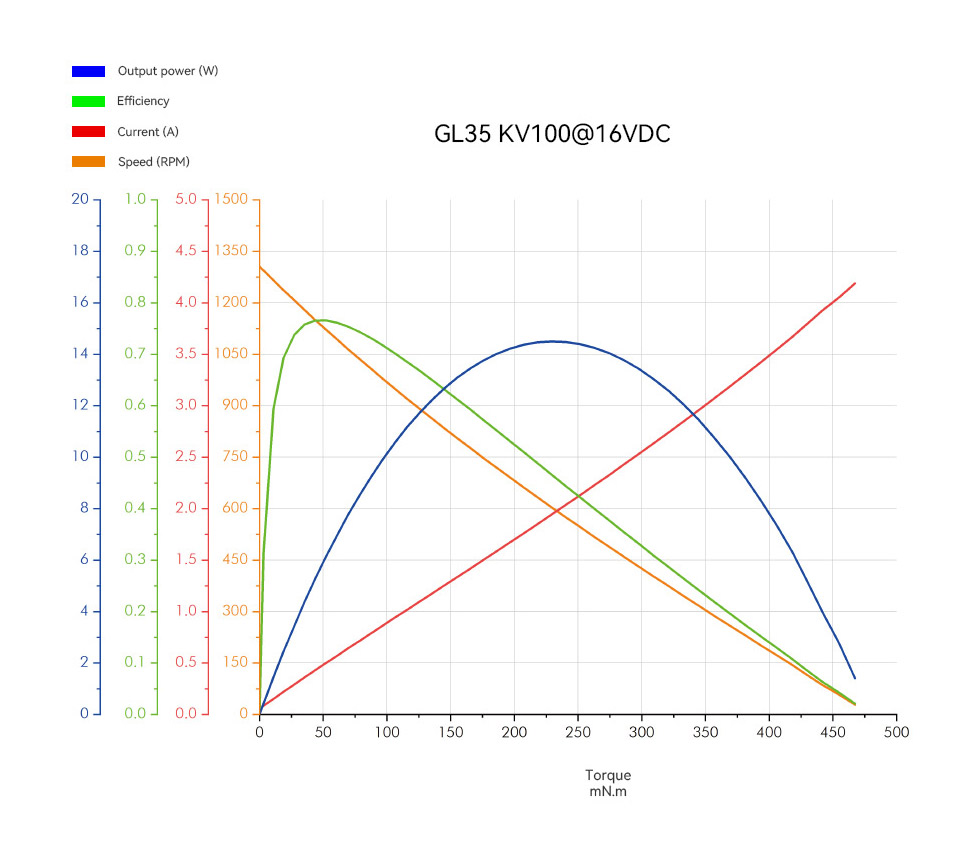
Couple maximal: 0.46Nm
Vitesse à vide: 1320rpm
Conception légère: environ 90 g, adaptée aux systèmes de nacelle ou de pod soumis à de fortes contraintes de poids et d’encombrement
Faible couple d’encochage: garantit une sortie de couple fluide, répondant aux exigences du suivi et de la stabilisation de haute précision
Large trou central traversant: permet le passage aisé des câbles de signal et d’alimentation, idéal pour les configurations avec bagues collectrices ou mécanismes rotatifs
Haute compatibilité: fonctionne parfaitement avec les contrôleurs de nacelle AlexMos et diverses solutions d’entraînement pour nacelles
Résistance à la poussière et à l’eau IP45: adaptée aux environnements extérieurs et aux conditions d’utilisation exigeantes
Moteur de nacelle GL35 KV100 ×1
Certificat de conformité ×1





| Domaine d’application | Gimbal, Radar | Tension de tenue diélectrique | 500V 5mA/2s |
| Mode d’entraînement | FOC | Résistance d’isolement | 500V10MΩ |
| Température de fonctionnement (℃) | -20℃~50℃ | Nombre de phases | 3 |
| Type de bobinage | star | Nombre de paires de pôles | 7 |
| Classe d’isolation | H | ||
| Paramètres électriques | |||
| Tension nominale V | 16 | Constante de force contre-électromotrice V/krpm | 11.54 |
| Vitesse à vide rpm | 1320 | Résistance phase à phase (mΩ) | 3600 |
| Couple nominal Nm | 0.15 | Inductance phase à phase (μH) | 2100 |
| Vitesse nominale rpm | 815 | Moment d’inertie du rotor (g·cm²) | 61 |
| Courant nominal ADC | 1.3 | Constante moteur Nm/√W | 0.060610322 |
| Couple de crête Nm | 0.46 | Constante de temps mécanique (ms) | 1.66 |
| Courant de crête ADC | 4 | Constante de temps électrique ms | 0.58 |
| Constante de vitesse rpm/V | 82.5 | Poids g | 90 |
| Constante de couple Nm/A | 0.115 | Rapport couple/poids maximum (Nm/kg) | 5.11 |
| Catégorie | Modèle | Tension nominale (V) | Puissance nominale (W) | Couple nominal (Nm) | Courant nominal (A) | Vitesse nominale (RPM) | Couple de crête (Nm) | Courant de crête (A) | Vitesse à vide (RPM) | Résistance phase à phase (mΩ) | Inductance phase à phase (μH) | Nombre de paires de pôles | Poids (G) | Dimensions (diamètre × longueur) MM | Opération |
| Moteur GL II pour Gimbal | GL40 II KV82.5 | 16 | 19 | 0.25 | 1.88 | 697 | 0.68 | 5.22 | 1388 | 3000 | 1320 | 14 | 125 | Ф46.1*33.5 |  |
| Moteur GL II pour Gimbal | GL60 II KV28 | 16 | 10 | 0.6 | 1.56 | 153 | 1 | 2.75 | 448 | 5800 | 6000 | 28 | 276 | φ70.5*33.6 | |
| Moteur GL pour gimbal | GL30 KV290 | 12 | 16 | 0.08 | 2.13 | 1990 | 0.28 | 7.4 | 3060 | 1530 | 330 | 7 | 41 | Ф34.5*15.7 | |
| Moteur GL pour gimbal | GL35 KV100 | 16 | 13 | 0.15 | 1.3 | 815 | 0.46 | 4 | 1320 | 23600 | 2100 | 7 | 90 | Ф41.8*21 | |
| Moteur GL pour gimbal | GL40 KV70 | 16 | 12 | 0.25 | 1.62 | 430 | 0.5 | 3.3 | 1015 | 4500 | 1800 | 14 | 107 | Ф46.5*21.5 | |
| Moteur GL pour gimbal | GL60 KV25 | 24 | 20 | 0.6 | 1.35 | 310 | 1.75 | 4 | 516 | 5500 | 2720 | 14 | 230 | Ф69*22.3 | |
| Moteur GL pour gimbal | GL80 KV30 | 24 | 48 | 1 | 2.8 | 450 | 2.9 | 8.2 | 650 | 1800 | 1100 | 21 | 312 | Ф87*22.3 | |
| Moteur GL pour gimbal | GL80 KV60 | 24 | 106 | 1 | 5.6 | 1010 | 2.9 | 16.3 | 1300 | 450 | 270 | 21 | 315 | Ф87*22.3 | |
| Moteur GL pour gimbal | GL100 KV10 | 24 | 41 | 3 | 2.9 | 130 | 7.7 | 7.8 | 223 | 2650 | 2350 | 20 | 698 | Ф106.8*34.2 | |
 Moteur de nacelle GL35 sans encodeur — dessin 3D (STEP, ZIP)
Moteur de nacelle GL35 sans encodeur — dessin 3D (STEP, ZIP) 

