Créer votre compte CubeMars













Le moteur de stabilisation CubeMars GL30 KV290 est un moteur brushless compact spécialement conçu pour les nacelles, les stabilisateurs de prise de vue aérienne, les systèmes radar et autres applications à basse vitesse et haute précision. Grâce à sa conception ultra-légère, à sa forte densité de couple et à son très faible couple d’encochage, ce moteur intègre également un large alésage central, facilitant le passage des câbles ou l’intégration de bagues collectrices pour la transmission des signaux et de l’alimentation. Compatible avec le contrôle en boucle de vitesse et de position, il offre une réponse rapide et un contrôle précis, ce qui en fait un choix idéal pour les systèmes de nacelle hautes performances.
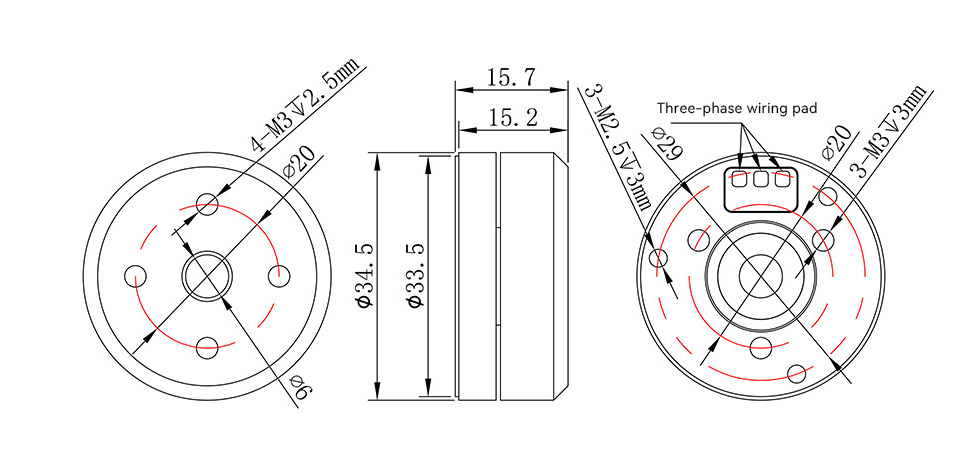
Dimensions du moteur: Ф34.5*15.7mm
Diamètre du trou traversant: 6mm
Poids du moteur: 41g
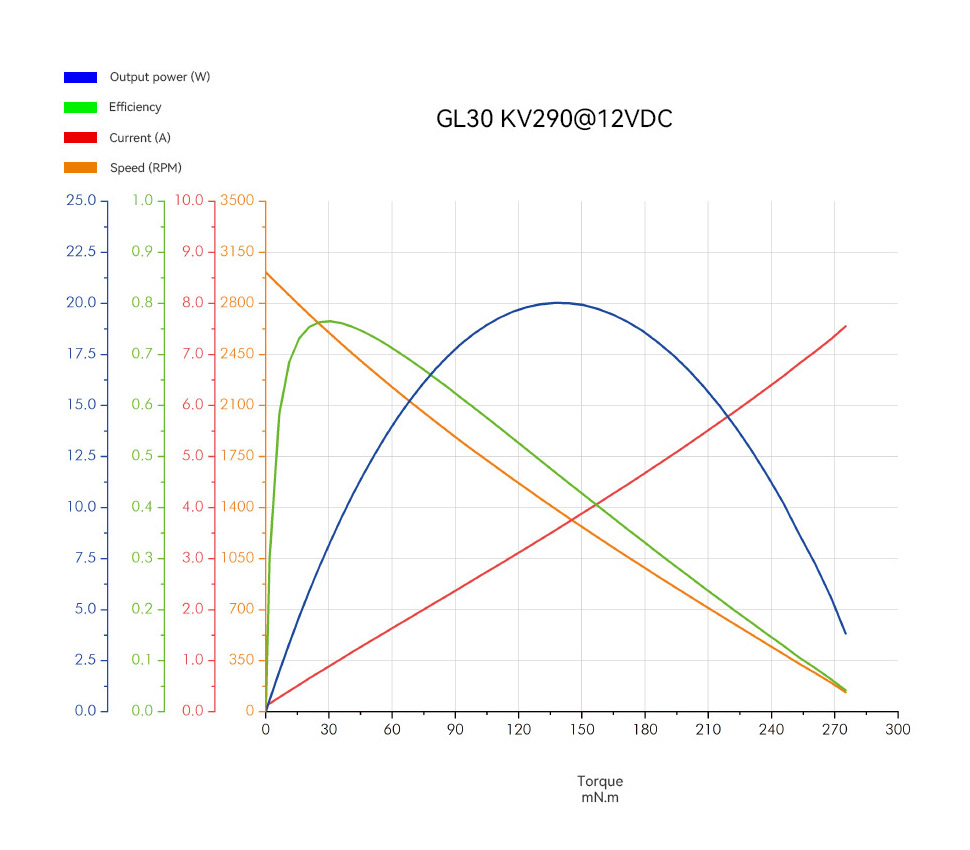
Couple maximal: 0.28Nm
Vitesse à vide: 3060rpm
Ultra-léger: ne pèse que 41 g, idéal pour les nacelles légères et les équipements aériens
Faible couple d’encochage / couple fluide: garantit un mouvement plus doux et un contrôle de précision accru
Large trou central traversant: alésage généreux facilitant le passage des câbles (signaux, alimentation, etc.) et compatible avec les bagues collectrices
Haute fiabilité: indice de protection IP45 contre la poussière et l’eau, adapté aux environnements extérieurs ou exigeants
Forte densité de couple: fournit un couple maximal de 0,28 Nm malgré une structure très légère, assurant une puissance élevée dans un format compact
Moteur de nacelle GL30 KV290 ×1
Certificat de conformité ×1





| Domaine d’application | Gimbal, Radar | Tension de tenue diélectrique | 500V 5mA/2s |
| Domaine d’application | FOC | Résistance d’isolement | 500V10MΩ |
| Température de fonctionnement (℃) | -20℃~50℃ | Nombre de phases | 3 |
| Type de bobinage | star | Nombre de paires de pôles | 7 |
| Type de bobinage | H | ||
| Paramètres électriques | |||
| Tension nominale V | 12 | Constante de force contre-électromotrice V/krpm | 3.73 |
| Vitesse à vide rpm | 3060 | Résistance phase à phase (mΩ) | 1530 |
| Couple nominal Nm | 0.08 | Inductance phase à phase (μH) | 330 |
| Vitesse nominale rpm | 1990 | Moment d’inertie du rotor (g·cm²) | 24.2 |
| Courant nominal ADC | 2.13 | Constante moteur Nm/√W | 0.030721179 |
| Couple de crête Nm | 0.28 | Constante de temps mécanique (ms) | 2.56 |
| Courant de crête ADC | 7.4 | Constante de temps électrique ms | 0.22 |
| Constante de vitesse rpm/V | 255 | Poids g | 41 |
| Constante de couple Nm/A | 0.038 | Rapport couple/poids maximum (Nm/kg) | 6.83 |
| Catégorie | Modèle | Tension nominale (V) | Puissance nominale (W) | Couple nominal (Nm) | Courant nominal (A) | Vitesse nominale (RPM) | Couple de crête (Nm) | Courant de crête (A) | Vitesse à vide (RPM) | Résistance phase à phase (mΩ) | Inductance phase à phase (μH) | Nombre de paires de pôles | Poids (G) | Dimensions (diamètre × longueur) MM | Opération |
| Moteur GL II pour Gimbal | GL40 II KV82.5 | 16 | 19 | 0.25 | 1.88 | 697 | 0.68 | 5.22 | 1388 | 3000 | 1320 | 14 | 125 | Ф46.1*33.5 |  |
| Moteur GL II pour Gimbal | GL60 II KV28 | 16 | 10 | 0.6 | 1.56 | 153 | 1 | 2.75 | 448 | 5800 | 6000 | 28 | 276 | φ70.5*33.6 | |
| Moteur GL pour gimbal | GL30 KV290 | 12 | 16 | 0.08 | 2.13 | 1990 | 0.28 | 7.4 | 3060 | 1530 | 330 | 7 | 41 | Ф34.5*15.7 | |
| Moteur GL pour gimbal | GL35 KV100 | 16 | 13 | 0.15 | 1.3 | 815 | 0.46 | 4 | 1320 | 23600 | 2100 | 7 | 90 | Ф41.8*21 | |
| Moteur GL pour gimbal | GL40 KV70 | 16 | 12 | 0.25 | 1.62 | 430 | 0.5 | 3.3 | 1015 | 4500 | 1800 | 14 | 107 | Ф46.5*21.5 | |
| Moteur GL pour gimbal | GL60 KV25 | 24 | 20 | 0.6 | 1.35 | 310 | 1.75 | 4 | 516 | 5500 | 2720 | 14 | 230 | Ф69*22.3 | |
| Moteur GL pour gimbal | GL80 KV30 | 24 | 48 | 1 | 2.8 | 450 | 2.9 | 8.2 | 650 | 1800 | 1100 | 21 | 312 | Ф87*22.3 | |
| Moteur GL pour gimbal | GL80 KV60 | 24 | 106 | 1 | 5.6 | 1010 | 2.9 | 16.3 | 1300 | 450 | 270 | 21 | 315 | Ф87*22.3 | |
| Moteur GL pour gimbal | GL100 KV10 | 24 | 41 | 3 | 2.9 | 130 | 7.7 | 7.8 | 223 | 2650 | 2350 | 20 | 698 | Ф106.8*34.2 | |
 Moteur de nacelle GL30 sans encodeur — dessin 3D (STEP, ZIP)
Moteur de nacelle GL30 sans encodeur — dessin 3D (STEP, ZIP) 

