Créer votre compte CubeMars









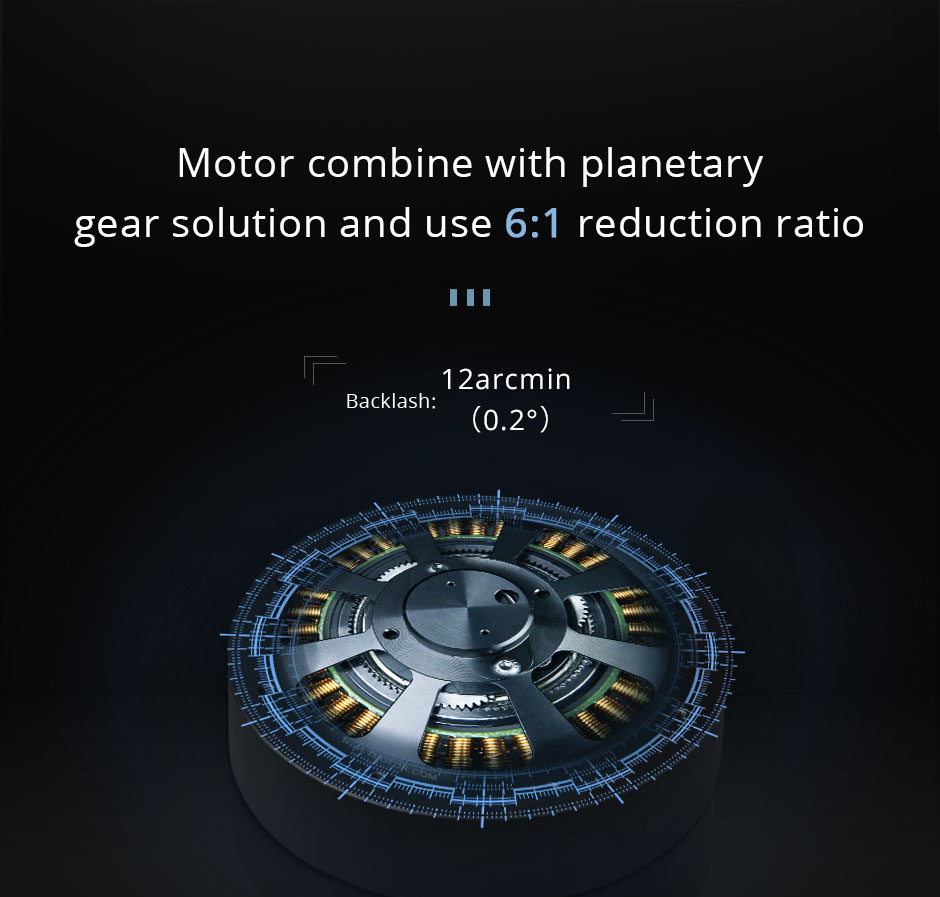
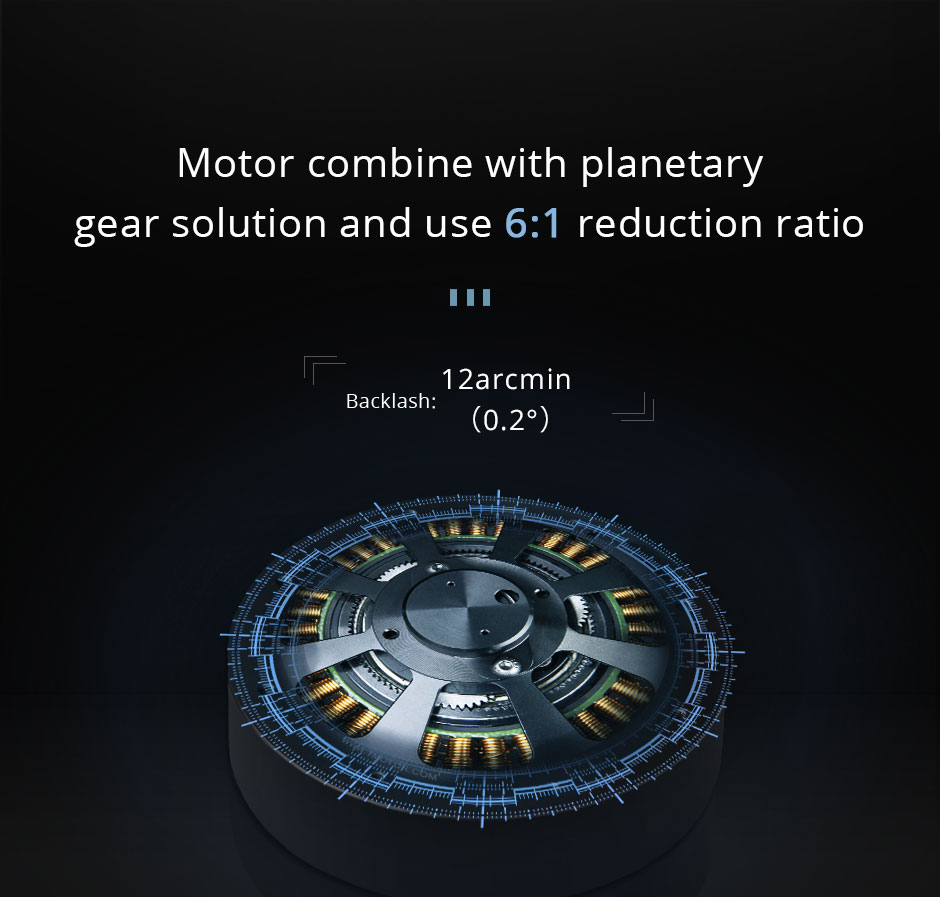
L’actionneur robotique CubeMars AK60-6 V1.1 KV140 intègre un moteur CC sans balais, un réducteur planétaire et une carte driver dans un ensemble compact et facile à installer. Équipé d’un réducteur planétaire 6:1, il fournit un couple stable tout en conservant une vitesse de réponse élevée. Le module prend en charge le contrôle multi-boucles (position, vitesse, couple et mode hybride MIT), dispose d’une connectivité plug-and-play et intègre un réglage PID adaptatif. Les protections intégrées contre les surintensités, les surtensions/sous-tensions et la surchauffe garantissent un fonctionnement fiable dans des environnements exigeants.
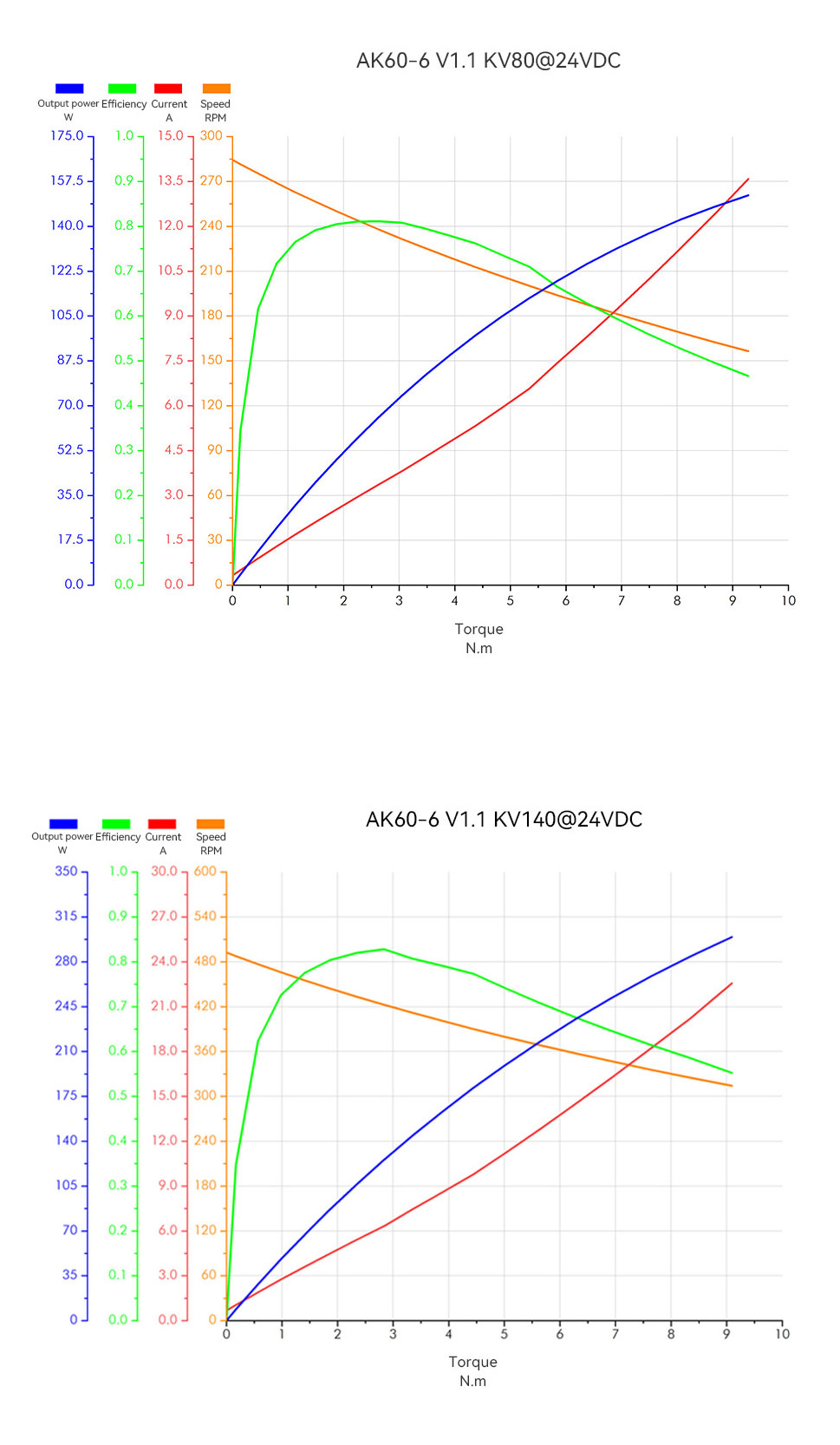
Vitesse à vide: 560rpm
Intégration élevée : conception tout-en-un combinant moteur, réducteur et driver, réduisant le câblage et simplifiant l’installation
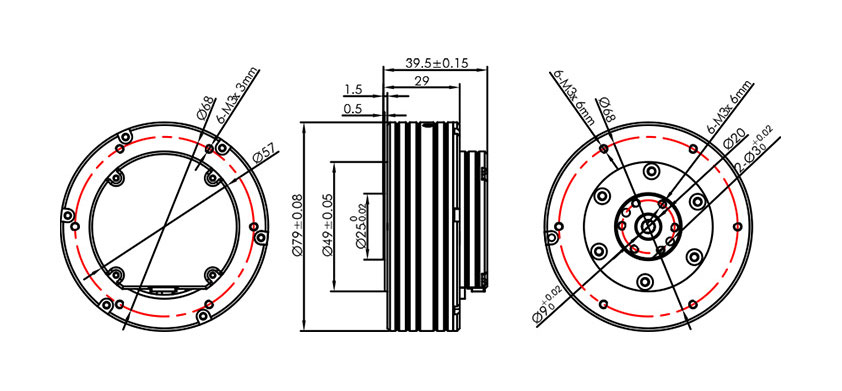
Compact et léger : poids d’environ 368g avec une épaisseur de seulement 39.5mm, idéal pour les systèmes soumis à des contraintes de poids et d’espace
Réduction de précision : réducteur planétaire 6:1 à faible jeu mécanique
Contrôle flexible : prise en charge des modes de contrôle servo et MIT
Protections de sécurité intégrées: inclut des protections contre les surintensités, les surtensions/sous-tensions et la surchauffe pour une fiabilité accrue du système
Certificat de conformité x1




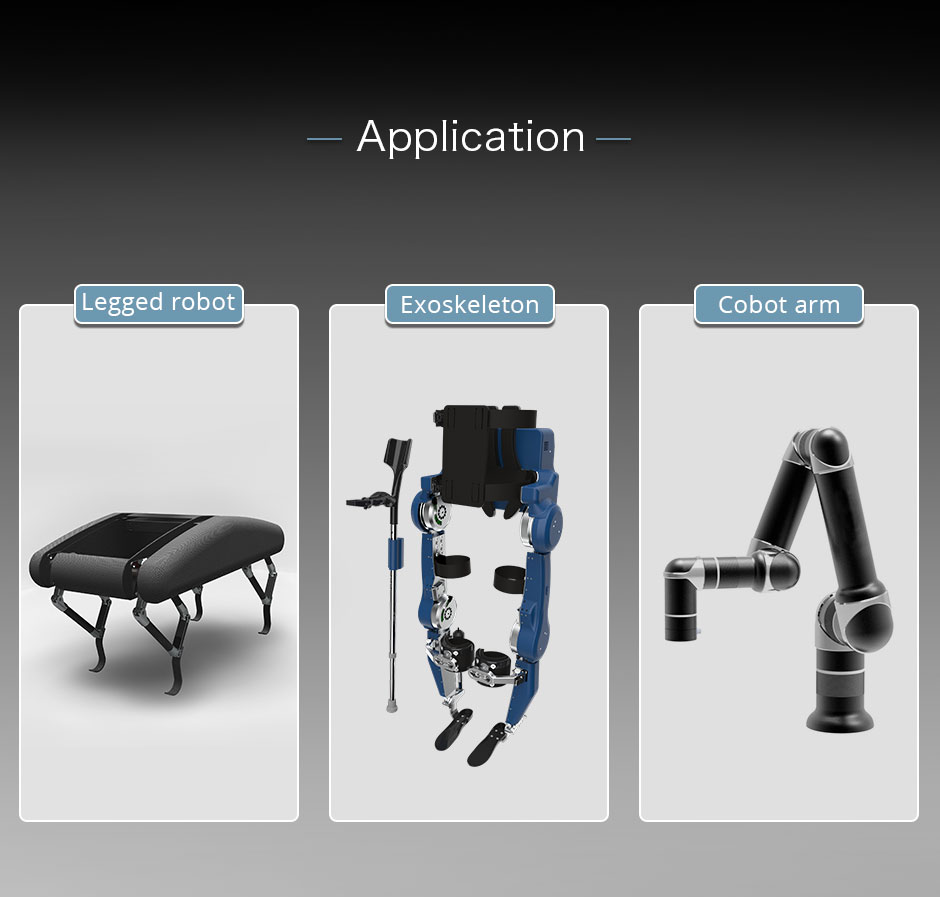
| Domaine d’application | Robot à pattes,Exosquelette,AGV | Couple de crête Nm | 9 |
| Mode d’entraînement | FOC | Courant de crête ADC | 22.7 |
| Température de fonctionnement (℃) | -20℃~50℃ | Constante de vitesse rpm/V | 140 |
| Type de bobinage | delta | Constante de couple Nm/A | 0.078 |
| Classe d’isolation | C | Constante de force contre-électromotrice V/krpm | 7.5 |
| Tension de tenue diélectrique | 500V 5mA/2s | Résistance phase à phase (mΩ) | 202 |
| Résistance d’isolement | 500V10MΩ | Inductance phase à phase (μH) | 138 |
| Nombre de phases | 3 | Moment d’inertie du rotor (g·cm²) | 243.5 |
| Nombre de paires de pôles | 14 | Constante moteur Nm/√W | 0.17 |
| Rapport de réduction | 6:01 | Constante de temps mécanique (ms) | 0.81 |
| Couple de rétro-entraînement Nm | 0.2 | Constante de temps électrique ms | 0.68 |
| Jeu angulaire arcmin | 0.55 | Poids g | 368 |
| Capteur de température | NTC MF51B 103F3950 | Rapport couple/poids maximal (Nm/kg) | 24.46 |
| Niveau sonore dB (à 65 cm du moteur) | 60 | Connecteur CAN | A1257WR-S-4P |
| Charge dynamique de base Cr(N) | 3150 | Connecteur UART | A1257WR-S-3P |
| Charge statique de base Cor(N) | 4500 | Connecteur UART | XT30PW-M |
| Tension nominale V | 24 | Type d’encodeur de boucle interne | Magnetic encoder |
| Couple nominal Nm | 3 | Résolution de l’encodeur de boucle interne | 14bit |
| Vitesse nominale rpm | 420 | Type d’encodeur de boucle externe | - |
| Courant nominal ADC | 6.5 | Résolution de l’encodeur de boucle externe | - |
| Nombre d’encodeurs | 1 |
| Catégorie | Modèle | Tension nominale (V) | Puissance nominale (W) | Couple nominal (Nm) | Courant nominal (A) | Vitesse nominale (RPM) | Couple de crête (Nm) | Courant de crête (A) | Vitesse à vide (RPM) | Rapport de réduction | Poids (G) | Dimensions (diamètre × longueur) MM | Carte driver | Encodeur | Opération |
| Actionneur robotique série AK | AK10-9 V3.0 KV60 | 48 | 442 | 18 | 10.7 | 235 | 53 | 31.9 | 320 | 9:1 | 940 | Ф98*61.7 | Yes | Double |  |
| Actionneur robotique série AK | AK10-9 V2.0 KV60 | 24/48 | 430 | 18 | 10.6 | 109/228 | 48 | 29.8 | 160/320 | 9:1 | 960 | Ф98*61.7 | Yes | Double | |
| Actionneur robotique série AK | AK80-9 V3.0 KV100 | 48 | 368 | 9 | 12 | 390 | 22 | 28 | 570 | 9:1 | 490 | Ф98*38.5 | Yes | Simple | |
| Actionneur robotique série AK | AK80-8 KV60 | 48 | 230 | 10 | 6.9 | 243 | 25 | 21 | 360 | 8:1 | 570 | Ф98*43.9 | Yes | Double | |
| Actionneur robotique série AK | AK45-36 V3.0 KV80 | 24 | 33.5 | 8 | 2 | 40 | 24 | 6.5 | 52 | 36:1 | 349 | φ55*56.5 | Yes | Double | |
| Actionneur robotique série AK | AK45-10 V3.0 KV75 | 24 | 39 | 2.5 | 1.9 | 120 | 7 | 5 | 180 | 10:1 | 262 | φ53*45.2 | Yes | Double | |
| Actionneur robotique série AK | AK40-10 V3.0 KV170 | 24 | 50 | 1.3 | 2.7 | 370 | 4.1 | 7.3 | 435 | 10:1 | 190 | φ53*40.2 | Yes | Double | |
| Actionneur robotique série AK | AK80-6 KV100 | 48 | 340 | 6 | 9.7 | 603 | 12 | 20 | 800 | 6:1 | 485 | Ф98*38.5 | Yes | Simple | |
| Actionneur robotique série AK | AK80-64 KV80 | 24/48 | 220 | 48 | 7 | 23/48 | 120 | 19 | 37/75 | 64:1 | 850 | Ф98*61.9 | Yes | Simple | |
| Actionneur robotique série AK | AK70-10 KV100 | 24/48 | 230 | 8.3 | 7.2 | 148/310 | 24.8 | 23.2 | 240/480 | 10:1 | 521 | Ф89*50.25 | Yes | Simple | |
| Actionneur robotique série AK | AK70-9 V3.0 KV60 | 48 | 231 | 8.5 | 6.25 | 260 | 29.2 | 23.8 | 320 | 9:1 | 540 | Ф89*49 | Yes | Double | |
| Actionneur planétaire à arbre creux série AKH | AKH70-48 V1.0 KV41 | 48 | 217 | 74 | 6 | 28 | 222 | 21 | 35 | 48:1 | 1396 | φ90*81.5 | Yes | Double | |
| Actionneur robotique série AK | AK60-6 V3.0 KV80 | 24/48 | 74 | 3 | 3.8 | 233/490 | 9 | 10.3/11.2 | 320/640 | 6:1 | 380 | Ф79*43 | Yes | Simple | |
| Actionneur robotique série AK | AK60-39 V3.0 KV80 | 48 | 176 | 24 | 4.5 | 70 | 72 | 17 | 98 | 39:1 | 750 | Ф79*67 | Yes | Double | |
| Actionneur robotique série AK | AK60-6 V1.1 KV140 | 24 | 130 | 3 | 6.5 | 420 | 9 | 22.7 | 560 | 6:1 | 368 | Ф79*39.5 | Yes | Simple | |
| Actionneur robotique série AK | AK45-36 KV80 | 24 | 33 | 8 | 2 | 40 | 24 | 6.5 | 52 | 36:1 | 340 | φ55*54 | Yes | Simple | |
| Actionneur robotique série AK | AK45-10 KV75 | 24 | 39 | 2.5 | 2.1 | 150 | 7 | 5 | 180 | 10:1 | 260 | Ф53*43 | Yes | Simple | |
| Actionneur robotique série AK | AK40-10 KV170 | 24 | 59 | 1.3 | 2.7 | 370 | 4.1 | 7.3 | 435 | 10:1 | 185 | φ53*37 | Yes | Simple | |
| Moteur à entraînement quasi direct de la série AKE | AKE90-8 KV35 | 48 | 700 | 55 | 21 | 120 | 170 | 72 | 210 | 8:1 | 1400 | Ф107.5*43.5 | No | |
|
| Moteur à entraînement quasi direct de la série AKE | AKE80-8 KV30 | 48 | 188 | 12 | 4.8 | 150 | 30 | 12 | 195 | 8:1 | 570 | Ф87*32 | No | |
|
| Moteur à entraînement quasi direct de la série AKE | AKE60-8 KV80 | 24 | 95 | 5 | 4.8 | 180 | 12.5 | 12 | 240 | 8:1 | 260 | Ф69*25 | No | |
|
| Actionneur robotique série AKA | AKA10-9 KV60 | 48 | 205 | 18 | 10.6 | 109 | 53 | 32 | 320 | 9:1 | 1060 | ∅100*70 | Yes | Simple | |
| Actionneur robotique série AKA | AKA60-6 KV80 | 24/48 | 62 | 3 | 4 | 200/400 | 9 | 11.2 | 320/640 | 6∶1 | 460 | Ф80*51.2 | Yes | Simple | |
| Actionneur planétaire à arbre creux série AKH | AKH70-16 V1.0 KV41 | 48 | 245 | 26 | 6.5 | 90 | 85 | 23 | 105 | 16:1 | 879 | φ90*60.5 | Yes | Double | |



