Les moteurs de la série GL II, spécialement conçus pour les systèmes de nacelles haut de gamme, excellent aussi bien dans les applications de stabilisation que dans les systèmes de conduite autonome. Évolution de la série GL, la série GL II intègre une conception électromagnétique et structurelle de nouvelle génération. Les principales améliorations comprennent un diamètre d’arbre creux plus important pour accueillir davantage de bagues collectrices, un couple d’encochage optimisé pour de meilleures performances servo à basse vitesse, ainsi qu’une nouvelle carte de commande creuse permettant un contrôle moteur plus précis. Ces optimisations offrent des performances globales supérieures et renforcent la satisfaction client.
1. Haute intégration (conception tout-en-un)
Structure deux-en-un : intègre de manière compacte le moteur de nacelle frameless et la carte de commande, éliminant le besoin de drivers externes indépendants, de câblages complexes et de connecteurs supplémentaires.
Compact et léger : réduit significativement le volume et le poids globaux du système.
2. Composants clés haute performance
Moteur à haute densité de couple : utilise des aimants en néodyme-fer-bore de haute qualité et une conception électromagnétique optimisée dans une architecture frameless, offrant un couple élevé et un excellent rendement tout en conservant un format compact.
Conception à très faible couple d’encochage : grâce à l’optimisation du circuit magnétique et de la structure mécanique, le fonctionnement à basse vitesse est extrêmement fluide, sans à-coups ni vibrations, assurant une compatibilité avec une large variété de systèmes de nacelles.
3. Entraînement et contrôle intelligents
Modes de contrôle multiples : prend en charge le contrôle du couple, de la vitesse et de la position, afin de s’adapter à différents scénarios d’application.
4. Communication et interfaces avancées
Prise en charge CAN et PWM
Plug-and-Play : interfaces électriques et mécaniques standardisées, pilotage par l’envoi de commandes via le bus, réduisant considérablement la complexité d’utilisation et le seuil de mise en œuvre.
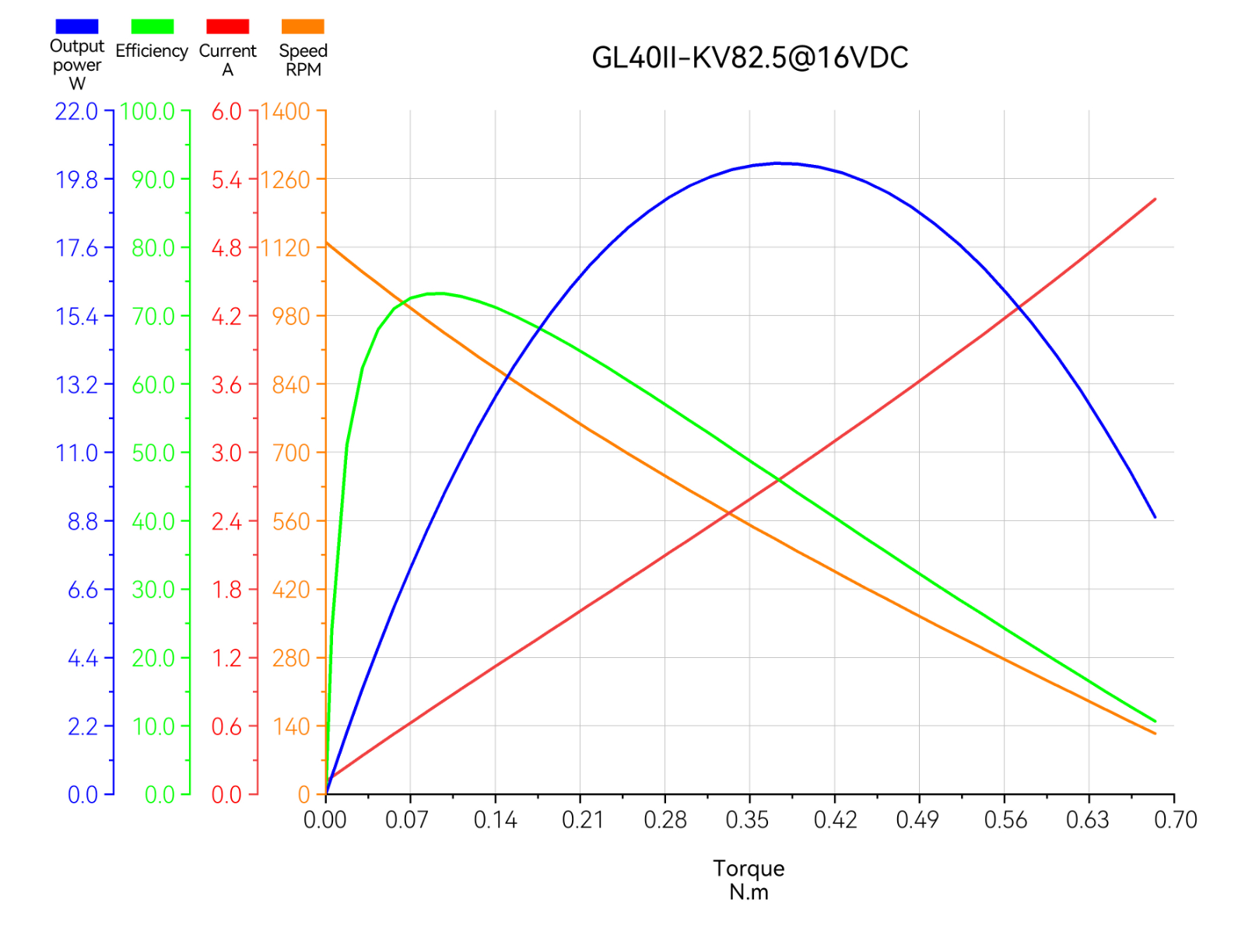
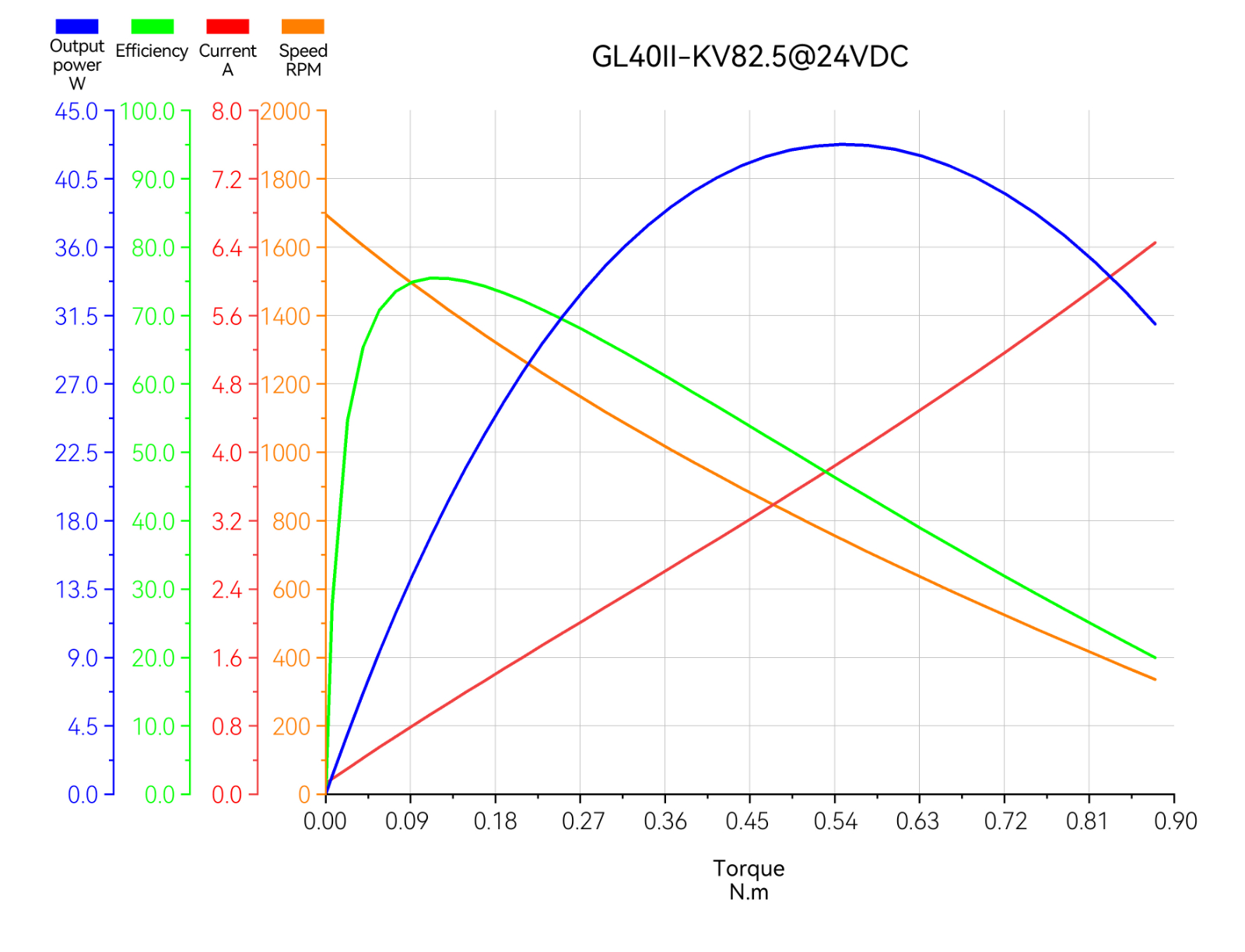
Moteur pour cardan GL40 II
Fonctionnement fluide, entraînement
intégré, arbre creux de grand diamètre
Installez une carte de contrôle creuse pour un contrôle plus flexible
Entraînement intégré, contrôle optimal
Installez une carte de contrôle creuse prenant en charge la communication CAN et PWM.
Les 3 modes de contrôle permettent de répondre flexiblement aux différents besoins.
MIT
Mode
Vitesse-Position
Mode
Vitesse
Mode
EM amélioré, couple d’encochage réduit
Conception électromagnétique et structure moteur améliorées.
Réduction du couple d’encochage de 1 cN·m à 0,7 cN·m, améliorant la performance servo à basse vitesse.
0.7cN.m
Grand alésage, plus de compatibilité
Le diamètre de l’arbre creux du moteur est passé de Ø8 mm à Ø12,5 mm, permettant d’accueillir davantage de bagues collectrices.
Le diamètre total du moteur a été réduit de Ø46,5 mm à Ø46,1 mm.
Ø12.5mm
Le diamètre de l’arbre creux du moteur
Ø46.1mm
Le diamètre total du moteur
Interface double noir & blanc Gratuite pour le débogage
L’interface noire est une XT30 2+2, combinant le câble d’alimentation et le câble de signal CAN en un seul,
rendant la transmission du signal plus sûre et fiable.
L’interface blanche est une CJT 3 broches,
pratique pour se connecter à l’ordinateur hôte afin de communiquer et d’ajuster les paramètres.
XT30 2+2
Interface noire
CJT-3pin
Interface blanche
Ordinateur hôte intégré Opération simplifiée
Ouverture des paramètres de boucle de courant et réglage du débit en bauds du port série.
Reconnaissance des paramètres du moteur en un seul clic.
Différents modes de fonctionnement, sélection plus flexible des pages de l’ordinateur hôte.























 GLII-Arduino code de test
GLII-Arduino code de test 

