创建您的CubeMars账号

腿式机器人模拟生物体的运动方式,利用多个关节和驱动系统进行灵活的移动,它们通常依靠高度精确的步态控制算法和动力学建模,在复杂地形中提供更强的适应性。腿式机器人的设计涉及到多自由度的驱动系统和高效的电机控制系统, 如马萨诸塞大学阿默斯特分校开发的单足机器人StaccaToe。
轮式机器人依赖于简单且高效的轮式驱动系统,通常具有较低的制造成本和较高的速度,适用于大多数工业和商业环境。轮式机器人采用电机驱动轮子进行直线或转向运动,能够高效快速地在平坦的地面上工作,如萨班大学BR团队开发的四轮机器人Legacy V2 。
特性 | 腿式机器人(StaccaToe) | 轮式机器人(Legacy V2) |
适应地形能力 | 高,能够适应各种复杂、崎岖的地形,适合灾后救援、军事侦察等场景 | 较低,适用于平坦地面,使用四轮独立转向系统提高在狭小空间中的机动性 |
速度 | 较慢,优先考虑稳定性和精确控制 | 较快,尤其在平坦地面上具有较高的速度和高效性 |
精确控制 | 高,利用电机和精确的步态控制,保证精准的运动 | 中等,四轮独立转向系统提供良好的操控性,但相对较依赖平坦地面 |
设计复杂度 | 高,涉及多自由度的关节驱动和复杂的控制算法 | 中等,四轮独立转向系统相对简单,但仍需较复杂的电子控制系统 |
驱动系统 | 多关节驱动(髋、膝、踝),需要高峰值扭矩 | 轮式驱动电机,强调持续扭矩输出 |
维护成本 | 高,涉及复杂的机械结构与控制系统 | 低,简洁的电机和驱动系统易于维护 |
腿式机器人通常需要在复杂的地形和环境中进行运动,包括爬坡、跨越障碍物和应对不平坦的地面。为了实现这些精细的动作,腿式机器人不仅要求较高的扭矩输出,还需要能够在不牺牲精度和稳定性的前提下提供持续的动力。因此,在腿式机器人电机选择上,需要综合考虑扭矩需求、运动精度和能源效率等因素,以保证机器人能够应对复杂任务。
扭矩输出与精度控制的平衡
腿式机器人电机的核心在于:既要提供高扭矩输出,又要保证运动过程中的高精度与低抖动。因此,常见方案是采用无刷直流电机(BLDC)+减速器+编码器的关节模组,在低速工况下仍能保持稳定输出与精细控制。
高精度
通常采用BLDC电机+高精度编码器或一体化伺服执行器,通过闭环控制实现位置与力矩的精确反馈,确保步态控制的稳定性与重复性。
高响应
选择低转子惯量BLDC电机或直驱/低减速比方案,配合高带宽驱动器,实现快速启停与动态响应,满足跳跃、落地缓冲等高动态动作需求。
高效能与低功耗设计
对于腿式机器人来说,长时间连续运行的能力是一个重要考量。因此,腿式机器人电机的能效必须得到优化。设计时,需要通过选择高效能电机,并与高效驱动系统配合,达到在不牺牲性能的前提下,延长电池使用时间的目标。此外,低功耗特性能有效提高机器人的续航能力,使其在执行任务时减少能源浪费,确保能够持续执行复杂的动作。
综合控制系统与动态调整
腿式机器人还需要高度集成的控制系统,能够根据不同的运动任务动态调整电机的输出。电机不仅要提供稳定的动力支持,还要能在不同负载和环境变化下做出快速的响应调整。因此,电机的控制系统应具备多模式调节能力,例如位置、速度和力矩的闭环控制,确保机器人在复杂任务中能够灵活、精确地调整运动状态。
实际应用

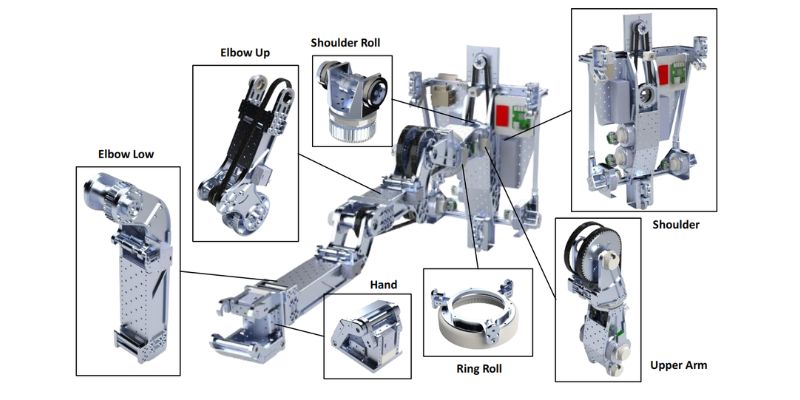
以单足机器人StaccaToe为例,StaccaToe的膝关节使用的AK80-9 V3.0 KV100机器人动力模组具备高扭矩输出和高响应性,能够为机器人在复杂地形中提供强大的动力支持,同时保持精确的运动控制。其多闭环控制(包括位置、速度、力矩及MIT混合模式)和智能调节功能,使得膝关节在执行复杂步态和跨越障碍时,能够精准应对各种负载变化,保证机器人运动的稳定性和灵活性。
踝关节电机和足关节电机使用的AK10-9 V2.0 KV60和AK60-6 V1.1 KV80机器人动力模组也同样具备高精度的扭矩控制能力,使机器人能够在跳跃和脚趾平衡等任务中保持灵活性和稳定性。
核心参数
型号 | 电机尺寸 | 电机重量 | 峰值扭矩 | 空载转速 |
Ф98*38.5mm | 480g | 22Nm | 570rpm | |
Ф98*61.7mm | 960g | 48Nm | 320rpm | |
Ф79*39.5mm | 368g | 9Nm | 320rpm |
与腿式机器人相比,轮式机器人的依赖更多是持续的扭矩输出和传动系统效率,而不是高动态关节扭矩。
轮式机器人通常在较为平坦的地面上运行,主要任务是进行快速移动、精准定位和高效任务执行。虽然轮式机器人的任务相比腿式机器人要求的地形适应性较低,但对于高速运动和灵活转向的要求依然需要精密的电机系统和驱动控制。因此,在轮式机器人电机选型上,通常需要选择能够提供高扭矩输出、高能效和精细控制的动力系统。
高扭矩输出与高能效
高扭矩输出
轮式机器人在启动、加速以及负载变化(如搬运物料或爬坡)过程中,对电机的扭矩输出能力有较高要求。通常采用无刷直流电机(BLDC)配合行星减速器的方案,在保证响应速度的同时显著放大输出扭矩。这种组合能够在低速工况下提供稳定且持续的驱动力,确保机器人在重载或长时间运行中依然具备良好的动力性能和运动稳定性。
高能效
轮式机器人往往需要长时间连续运行,因此电机系统的能效直接影响整体续航能力。通过选用高效率BLDC电机并结合FOC(磁场定向控制)驱动算法,可以有效降低电能损耗和发热。同时,无刷结构减少了机械摩擦,提高能量转化效率。在实际应用中,这不仅有助于延长电池使用时间,还能提升系统稳定性,满足物流、仓储及工业自动化等场景对高效运行的需求。
差速驱动与全向驱动
在电机选择时,轮式机器人往往使用差速驱动或全向驱动系统来提高运动灵活性和精度:
差速驱动系统: 轮式机器人通过控制左右轮子的转速差来调整机器人的转向和速度,常用于需要稳定性和简单控制的应用。
全向驱动系统: 使用多个全向轮,允许机器人在任意方向上平滑移动,适用于狭小空间或需要高精度操作的任务。
高效驱动系统与控制
为了提高轮式机器人的能效并保证其长时间高效运行,通常需要采用高效驱动系统和智能电机控制系统。这些系统不仅能根据任务需求自动调整电机输出,还能通过精准控制减少能源消耗,提高整体能效。通过精确控制电机的扭矩和转速,轮式机器人能够在各种任务中平稳、迅速地完成工作。
实际应用

在2024年的大学火星车挑战赛(University Rover Challenge,简称URC)中,TMR团队采用了CubeMars的AK70-10 KV100机器人动力模组,满足了轮式机器人对高扭矩、高能效、精细控制的多重需求,确保机器人能够在长时间、高负载任务中保持稳定性与高效性,提升了火星车的反应能力和操作性能。
核心参数
型号 | 电机尺寸 | 电机重量 | 峰值扭矩 | 空载转速 |
Ф89*50.25mm | 521g | 24.8Nm | 480rpm |
地形适应与灵活性
腿式机器人最大的优势在于其出色的地形适应性,能够轻松跨越台阶、崎岖地面以及其他障碍物。这使得腿式机器人在灾难救援、军事侦察等复杂环境下具有无可比拟的优势。
电机与控制系统优化
通过使用高效动力系统和先进的控制算法,腿式机器人不仅能够提高运动稳定性,还能在能量消耗上做到优化。这对于需要长时间工作的任务(如废墟搜索、侦察任务)至关重要。
应用案例
灾后救援:腿式机器人能够进入被废墟阻挡的区域,帮助寻找生还者。
军事侦察:在崎岖地形中,腿式机器人能够执行复杂的侦察任务。
高效性与稳定性
轮式机器人在平坦地面上表现出色,凭借其高速和高效的电机系统,广泛应用于工业自动化、仓储管理和物料搬运等领域。
电机选择与性能
轮式机器人通常采用无刷直流电机(BLDC)和执行器,这种电机因其高效率、低噪音和长寿命而广泛应用于需要长时间稳定运行的场景。
应用案例
自动化仓库:轮式机器人在仓储自动化中高效搬运物品,提升整体作业效率。
物料运输:轮式机器人在工厂和物流中心中实现快速、精确的物料搬运。
选择腿式机器人还是轮式机器人,主要取决于以下几个因素:
地形适应性需求:如果应用场景包含不平坦地面或障碍物,腿式机器人将是更好的选择。
速度与能效:如果任务要求高效、快速且平坦地面,轮式机器人则更加适合。
预算与维护成本:腿式机器人由于设计复杂,初期成本和维护成本较高;而轮式机器人在这方面更具经济性。
腿式机器人与轮式机器人的选择本质是对应用场景与性能需求的权衡:若面对复杂地形、障碍环境及高精度运动控制需求,腿式机器人凭借其出色的适应性与灵活性更具优势;而在平坦环境、高效率运行及成本控制要求下,轮式机器人则更为经济高效。与此同时,电机选型作为核心驱动要素,直接影响机器人的性能表现与系统稳定性。
综合来看,只有将机器人结构方案与电机系统合理匹配,才能在性能、效率与成本之间取得最佳平衡,实现整体系统的最优设计。