La série RO entièrement repensée
DÉVOILE UNE
NOUVELLE ICÔNE
COUPLE D’ENCOCHAGE ULTRA-FAIBLE
50

GRAND ALÉSAGE CREUX
CONCEPTION À ALÉSAGE TRAVERSANT












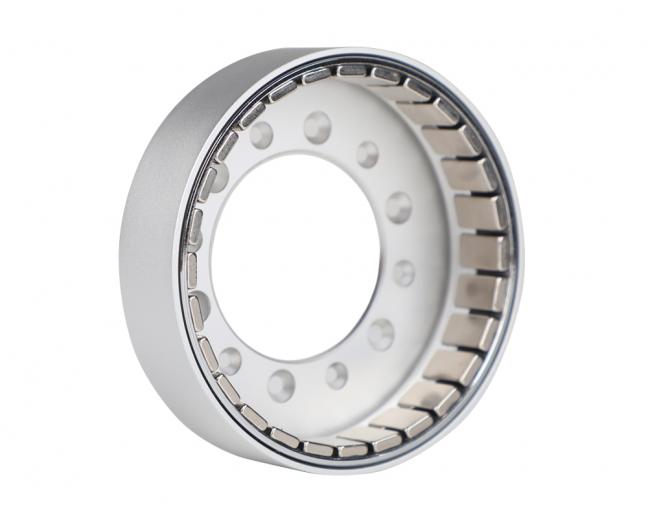





Le CubeMars RO60 KV115 est un nouveau moteur à couple sans cadre de la série RO, équipé de capteurs Hall intégrés en standard. Il est spécialement conçu pour les applications hautes performances telles que les articulations robotiques, les exosquelettes, les bras robotiques collaboratifs (cobots), les dispositifs médicaux et les systèmes aérospatiaux.
Fonctionnant à une tension nominale de 48 V, ce moteur présente une conception à couple de cogging ultra-faible et un arbre creux de grand diamètre, ce qui permet un remplacement flexible de l'arbre et des configurations de montage polyvalentes (par exemple, intégration directe avec des boîtes de vitesses, câblage par le centre ou passage de l'arbre d'entraînement). Les capteurs Hall et de température intégrés fournissent un retour d'information précis sur la position du rotor et une surveillance thermique en temps réel pour une précision de contrôle et une sécurité du système améliorées.
Avec un couple continu de 0,8 N·m (couple maximal jusqu'à 2,4 N·m) et un poids total de seulement 248 g, le RO60‑KV115 offre une réactivité et une stabilité exceptionnelles dans les plateformes robotiques à espace restreint.
Dimensions du moteur: Φ73.8 × 23 mm
Poids: 248 g
Couple maximal: 2.4 N·m
Vitesse à vide: 5520 rpm
Couple de cogging ultra-faible: couple de cogging réduit d'environ 50 % par rapport aux moteurs de classe similaire, garantissant un fonctionnement plus fluide à basse vitesse et une meilleure fidélité du contrôle des mouvements
Conception à grand alésage creux: prend en charge un arbre creux plus grand pour s'adapter à divers besoins structurels, notamment le cheminement des câbles, les arbres de transmission et la connexion directe aux réducteurs à engrenages.
Capteurs Hall + température intégrés: permettent une commutation précise et une protection thermique en temps réel, renforçant ainsi la fiabilité et la sécurité du système
Compact et léger: ne pesant que ~248 g, idéal pour les articulations robotiques hautes performances et les applications soumises à des contraintes strictes en termes d'espace et de poids
Large compatibilité d'application : convient aux exosquelettes, aux bras collaboratifs, aux robots médicaux, aux robots quadrupèdes, aux AGV d'inspection, etc.
Moteur couple sans cadre RO60 KV115 standard avec capteur à effet Hall ×1
Certificat de conformité ×1
| RO60 KV 115 – Version standard |
 |
| RO60 KV115 – Version Lite |
 |
| RO60 KV 115 – Version standard | |||
| Domaine d’application | Cobot Arm | Classe d’isolation | F |
| Mode d’entraînement | FOC | Tension de tenue diélectrique | 500V |
| Température de fonctionnement (℃) | -20℃~50℃ | Résistance d’isolement | 10MΩ |
| Type de bobinage | star | Couple d’encochage | 15N.mm |
| Nombre de paires de pôles | 14 | Moment d’inertie du rotor (g·cm²) | 1161gcm² |
| Rapport couple maximal / poids | 9.68Nm/kg | Poids (g) | 248g |
| Poids du rotor | 105g | Poids du stator | 143g |
| Fil de température des capteurs Hall | 30#Fil en silicone AWG100±5mm Tinning5±2mm | Sortie de câbles | Sortie de câble moteur triphasé : fil émaillé en sortie directe, longueur 100±5 mm, étamage 5±2 mm |
| Section du câble triphasé | 3mm | ||
| RO60 KV115 – Version Lite | |||
| Domaine d’application | Cobot Arm | Classe d’isolation | F |
| Mode d’entraînement | FOC | Tension de tenue diélectrique | 500V |
| Température de fonctionnement (℃) | -20℃~50℃ | Résistance d’isolement | 10MΩ |
| Type de bobinage | star | Couple d’encochage | 15N.mm |
| Nombre de paires de pôles | 14 | Moment d’inertie du rotor (g·cm²) | 800gcm² |
| Poids du rotor | 70g | Poids (g) | 195g |
| Hauteur maximale de dépassement du fil émaillé | 5mm | Poids du stator | 125g |
| Section du câble triphasé | 3mm | Sortie de câbles | Sortie de câble moteur triphasé : fil émaillé en sortie directe, longueur 100±5 mm, étamage 5±2 mm |
| Paramètres électriques | |||
| Tension nominale V | 48V | Constante de force contre-électromotrice V/krpm | 8.28V/krpm |
| Vitesse à vide rpm | 5520rpm | Résistance phase à phase (mΩ) | 300mΩ |
| Couple nominal Nm | 0.8Nm | Inductance phase à phase (μH) | 395μH |
| Vitesse nominale rpm | 4200rpm | Constante moteur Nm/√W | 0.17Nm/√W |
| Courant nominal ADC | 8.5ADC | Constante de temps mécanique (ms) | 2.86ms |
| Couple de crête Nm | 2.4Nm | Electrical Time Constant | 1.32ms |
| Courant de crête ADC | 40ADC | Constante de temps mécanique (ms) | 0.094Nm/A |
| Constante de vitesse rpm/V | 115rpm/V | ||

| Catégorie | Modèle | Tension nominale (V) | Puissance nominale (W) | Couple nominal (Nm) | Courant nominal (A) | Vitesse nominale (RPM) | Couple de crête (Nm) | Courant de crête (A) | Vitesse à vide (RPM) | Résistance phase à phase (mΩ) | Inductance phase à phase (μH) | Nombre de phases | Poids (G) | Dimensions (diamètre × longueur) MM | Capteur Hall | Capteur de température | Opération |
| Moteur de couple Outrunner Frameless RO | RO100 KV55 Version standard (avec capteurs Hall) | 48 | 838 | 4 | 20 | 2000 | 12 | 62 | 2550 | 143 | 137 | 21 | 710 | Ф113.5*36.2 | Yes | Yes |  |
| Moteur de couple Outrunner Frameless RO | RO100 KV55 Lite without hall | 48 | 838 | 4 | 20 | 2000 | 12 | 62 | 2550 | 143 | 137 | 21 | 525 | Ф108.3*28 | No | No | |
| Moteur de couple Outrunner Frameless RO | RO80 KV105 Standard avec Hall | 48 | 490 | 1.3 | 15 | 3600 | 4 | 50 | 5040 | 120 | 103 | 21 | 352 | Ф92.6*26.4 | Yes | Yes | |
| Moteur de couple Outrunner Frameless RO | RO80 KV105 Lite sans capteur Hall | 48 | 490 | 1.3 | 15 | 3600 | 4 | 50 | 5040 | 120 | 103 | 21 | 265 | Ф88.6*17.7 | No | No | |
| Moteur de couple Outrunner Frameless RO | RO60 KV115 – Version standard avec capteurs Hall | 48 | 352 | 0.8 | 8.5 | 4200 | 2.4 | 40 | 5520 | 300 | 395 | 14 | 248 | Ф73.8*23 | Yes | Yes | |
| Moteur de couple Outrunner Frameless RO | RO60 KV115 Lite sans Hall | 48 | 352 | 0.8 | 8.5 | 4200 | 2.4 | 40 | 5520 | 300 | 395 | 14 | 195 | Ф70.5*15 | No | No | |
| Moteur de couple Outrunner Frameless RO | RO40 KV140 Lite | 24 | 51 | 0.2 | 2.85 | 2450 | 0.6 | 11.6 | 3400 | 1700 | 580 | 14 | 60 | Ф46.3*13 | No | No | |
| Moteur de couple Outrunner Frameless RO | RO50 KV108 Lite | 24 | 66 | 0.3 | 3.4 | 2100 | 0.9 | 0.9 | 2600 | 1035 | 460 | 14 | 105 | Ф41.7*14.5 | No | No | |



