CubeMars 계정 만들기


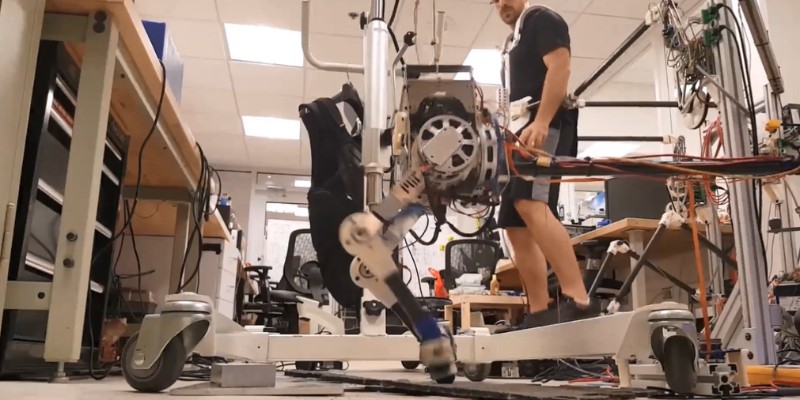
매사추세츠 대학교 Amherst 캠퍼스에서 개발한 StaccaToe 로봇은 인간의 다리와 발가락 움직임을 모방하도록 설계된 단다리 로봇입니다. 이 최첨단 로봇은 첨단 제어 기술과 혁신적인 모터 설계를 통합하여 인간 생체역학 모방이 복잡한 지형 탐색과 고난도 작업 수행 성능 향상에 어떻게 기여할 수 있는지 탐구합니다.
StaccaToe의 기계적 설계는 다리 무게를 줄이면서 필수적인 구조 강성을 유지하도록 세심하게 최적화되었습니다. 이전 모델인 HyperLeg과 비교할 때, StaccaToe의 하체 구성품(정강이, 발목, 발)은 약 14.78%의 무게 감소를 달성하면서도 높은 비틀림 및 압축 강도를 유지했습니다. 대퇴부 구성품은 무게가 약간 증가했지만, 향상된 강성 덕분에 자신의 체중의 4배까지 압력을 견딜 수 있습니다. 이 경량이면서도 견고한 설계는 로봇이 민첩하고 복잡한 움직임을 수행할 수 있게 합니다.
StaccaToe 로봇은 궤적 최적화와 모델 예측 제어(MPC)를 결합하여 동적 환경에서 빠른 반응을 보장합니다. 이 시스템은 안정적인 보행을 가능하게 할 뿐만 아니라 점프와 같은 복잡한 동작도 수행할 수 있게 합니다. 특히 MPC는 다양한 지형에 대한 실시간 적응성을 제공하여, 로봇이 환경의 갑작스러운 변화에 대응할 때도 유연하고 안정적으로 유지되도록 합니다.
StaccaToe는 동적인 동작을 지원하기 위해 맞춤형 전력 시스템을 장착하여 모터에 높은 전류를 공급하면서 안정적인 작동을 유지합니다. 전력 시스템은 직렬 연결된 리튬이온 배터리 두 개를 사용하여 모터를 최대 허용 전압에 가깝게 구동함으로써 속도 제한과 전체 성능을 향상시킵니다. 이 설계는 에너지 효율성을 높일 뿐만 아니라 점프와 같은 고강도 작업 수행 시에도 안정적인 성능을 보장합니다.
StaccaToe 로봇의 모든 관절은 CubeMars로 구동됩니다 AK 시리즈 로봇 액추에이터로, 강력한 토크와 정밀한 모션 제어를 제공합니다. 특히, 무릎 관절에는 AK80-9 KV100 액추에이터가 사용되며, 높은 토크 출력과 낮은 백래시로 안정적인 움직임을 보장합니다. 발목과 발 관절에는 각각 AK10-9 V2.0 과 AK60-6 V1.1 액추에이터가 사용되어 고정밀 토크 제어를 제공합니다. 이 모터 덕분에 로봇은 점프 및 발끝 균형과 같은 작업 수행 중에도 유연성과 안정성을 유지할 수 있습니다.
이 모터들은 무게 최적화를 통해 더욱 복잡한 동적 움직임을 지원합니다. 또한, 고급 전류 제어 기술이 마찰과 기계적 손실을 최소화하여, StaccaToe가 성능을 저하시키지 않고 장시간 효율적으로 작동할 수 있도록 합니다.
로봇 시스템에서 케이블 관리는 종종 중요하지만 간과되기 쉬운 요소입니다. StaccaToe는 작동 중 케이블이 엉키거나 느슨해지는 것을 방지하기 위해 특수 케이블 관리 시스템을 적용하여 안정적인 전원 및 신호 연결을 보장합니다. 이 설계는 작동 중 전기적 고장의 위험을 크게 줄이고 시스템의 전반적인 신뢰성을 향상시킵니다.

결론
StaccaToe 로봇은 경량 구조 설계, 첨단 제어 기술, 효율적인 전력 관리, 정밀한 모터 제어의 융합을 보여줍니다. 이러한 혁신을 통해 StaccaToe는 생체역학적 동적 움직임을 탐구하고 복잡한 환경을 탐색하는 데 큰 잠재력을 보여줍니다. 학술 연구든 미래 실용적 응용이든, StaccaToe는 로봇 모션 제어의 최첨단 접근 방식을 대표합니다.