Crear su cuenta de CubeMars

Nikodem Bartnik creó un potente chasis robótico utilizando actuadores de la serie AK de CubeMars y Arduino
Después de intentar incorporar varios actuadores robóticos AK80-9 KV100 actuadores robóticos de CubeMars en un proyecto de brazo robótico, el YouTuber Nikodem Bartnik decidió cambiar de enfoque y desarrollar un chasis/plataforma robótica universal. Gracias a estos motores de alta potencia y alta precisión, su robot puede desplazarse por el suelo de forma rápida y precisa.
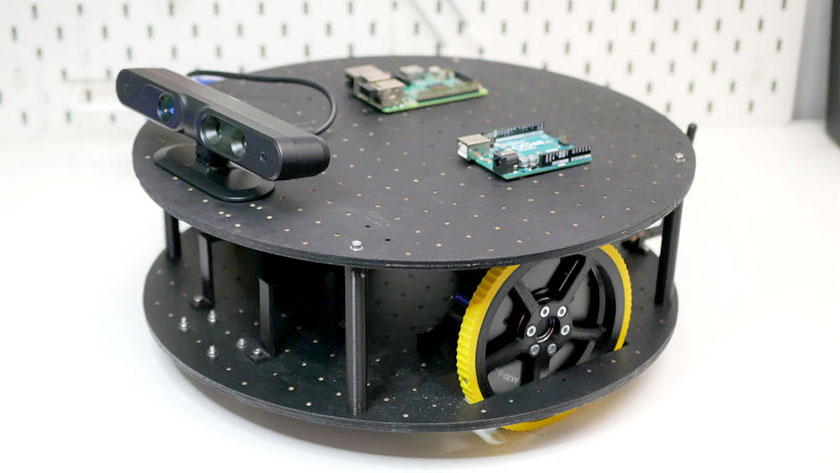
Una vez cortada una placa plana de madera contrachapada con la ayuda de un router CNC, Bartnik montó los dos motores y fijó una rueda a cada uno. Para controlar los motores, utilizó un único Arduino Uno y fabricó una PCB personalizada que enruta las señales del bus CAN entre el Arduino y los dos motores. Todo el sistema se alimenta mediante dos baterías LiPo, proporcionando un voltaje total de aproximadamente 24 V.

Actualmente, el robot funciona esencialmente como un coche RC, respondiendo a comandos enviados desde un sistema externo. En el proyecto de Bartnik, se utilizó otro Arduino Uno conectado a un portátil por USB y un módulo transceptor nRF24 para enviar datos de forma inalámbrica al módulo nRF24 del robot. También desarrolló un script en Python que permite configurar la velocidad de movimiento del robot y convertir las pulsaciones de las teclas de dirección en movimientos correspondientes.
Puedes ver el vídeo de Bartnik a continuación para obtener más información o consultar su repositorio para acceder al código del proyecto y a los archivos de diseño.


