CubeMars 계정 만들기

최근 수십 년간 로봇 외골격과 웨어러블 장치는 빠르게 발전하여 재활 및 이동 보조 분야에서 필수적인 도구로 자리 잡았습니다. 무릎 재활 분야에서 외골격은 능동적인 지지와 향상된 기능을 제공함으로써 환자의 회복 효율을 높이고 물리치료사의 업무 부담을 줄여줍니다.
칼리파 대학교의 연구팀은 기존 시스템이 제한적인 강성 범위나 느린 응답 속도만을 제공하던 한계를 해결하기 위해 조절 가능한 컴플라이언스를 갖춘 새로운 무릎 외골격을 개발했습니다. 이 새로운 설계는 보행 주기 전반에 걸쳐 강성을 실시간으로 조절할 수 있어, 인간 무릎 강성의 자연스러운 변화를 정밀하게 재현합니다.
연구에 따르면 정상 보행 시 무릎 관절은 약 10°~105°의 운동 범위를 필요로 하며, 요구 토크는 평지에서는 약 40 N·m에서 계단을 내려갈 때는 100 N·m 이상으로 증가합니다. 무릎 강성 또한 보행 주기 전반에 걸쳐 크게 변동하며, 초기 지지 단계에서는 최대 450 N·m/rad에 이르고 지지 단계 말기에는 약 30 N·m/rad까지 감소합니다. 칼리파 대학교의 설계는 이러한 생체역학적 요구 사항을 성공적으로 충족하며, 30~450 N·m/rad의 최적 강성 범위를 제공합니다.
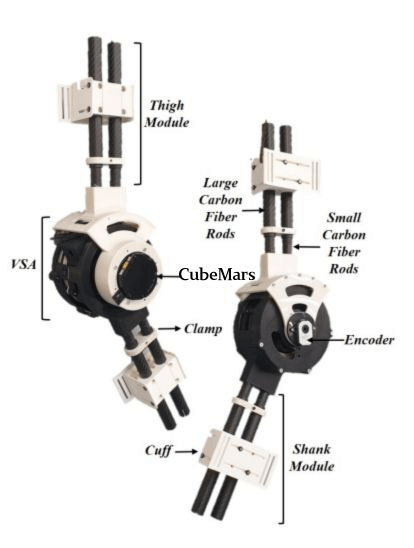
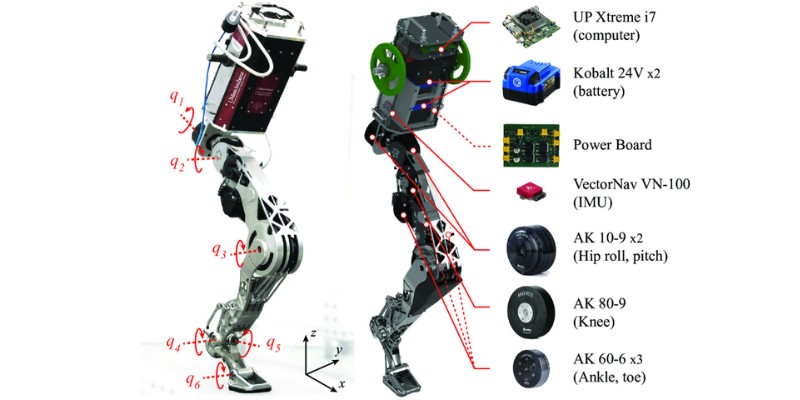
이러한 성능을 달성하기 위해 시스템은 CubeMars를 통합합니다 AK80-64 KV80 외골격 모터는 가변 강성 액추에이터(VSA)를 구동하는 외부 고토크 액추에이터로 통합됩니다. AK80-64는 자연스러운 무릎 역학을 재현하는 데 필요한 정밀도와 출력을 제공합니다:
높은 토크 밀도 – 컴팩트한 크기에 강력한 출력을 제공하여 하반신 외골격에 이상적입니다.
정밀 제어 – 보행 주기 시작 시 강성 전환을 빠르게 구현하고, 스윙 단계에서는 보다 부드러운 조정을 가능하게 합니다.
에너지 효율성 – 재활 세션 동안 사용 시간을 연장하고 전력 소비를 줄여줍니다.
매끄러운 통합 – 모듈형 설계로 로봇 외골격 시스템에의 통합이 간소화됩니다.
제품 | 크기 | 무게 | 정격 회전수 (RPM) | 정격 토크 | 최대 토크 | 최대 토크 밀도 |
AK80-64 KV80 | 98×62 mm | 850 g | 48 rpm | 48 Nm | 120 Nm | 141.2 Nm/kg |

실험 결과, 해당 프로토타입은 인간 생체역학에 맞춰 강성을 동적으로 조절할 수 있으며, 보행 속도 1.0~1.5 m/s 범위에서 무릎 강성 변화를 정확하게 추적하는 것으로 확인되었습니다. 기존 설계와 비교했을 때 응답 속도가 크게 향상되어, 안전하고 자연스러우며 효율적인 보행 재활이 가능해졌습니다.
T이번 협업은 임상 재활 분야에서 가변 강성 무릎 외골격의 잠재력과, 최첨단 로봇 기술에서 CubeMars 액추에이터의 신뢰성을 동시에 보여줍니다. 검증된 고성능을 바탕으로 CubeMars AK80-64 로봇 액추에이터는 재활 로봇, 웨어러블 외골격, 인간-로봇 상호작용 시스템 분야의 연구 및 산업 응용을 지속적으로 지원하고 있습니다.