CubeMars 계정 만들기

평지 너머로 나아가는 로봇 개
로봇 개의 시대가 빠르게 발전하고 있습니다. 한때 평지에서 걷고 달리는 것에 제한되었던 사족형 로봇들은 오늘날 거친 지형부터 수직 통로까지 극한 환경에 도전하고 있습니다. 가장 눈에 띄는 혁신 중 하나는 KLEIYN으로, 능동 허리 관절을 갖춘 굴뚝 등반용 사족형 로봇이며 CubeMars 로봇 액추에이터로 구동됩니다.

좁은 공간에서 고전하는 기존 로봇 개와 달리, KLEIYN은 두 벽에 다리와 몸통을 밀착시키고 인간 암벽 등반가처럼 수직으로 오를 수 있습니다.
KLEIYN의 무게는 약 18kg이며, 몸 길이는 760mm이고 13자유도(다리당 3자유도 + 허리 1자유도)를 제공합니다. 독특한 설계 덕분에 로봇은 800~1000mm 간격의 벽 사이에 몸을 끼우고 최대 150mm/s의 속도로 상승할 수 있으며, 이는 이전 수직 등반 로봇 시도보다 약 50배 빠른 속도입니다.

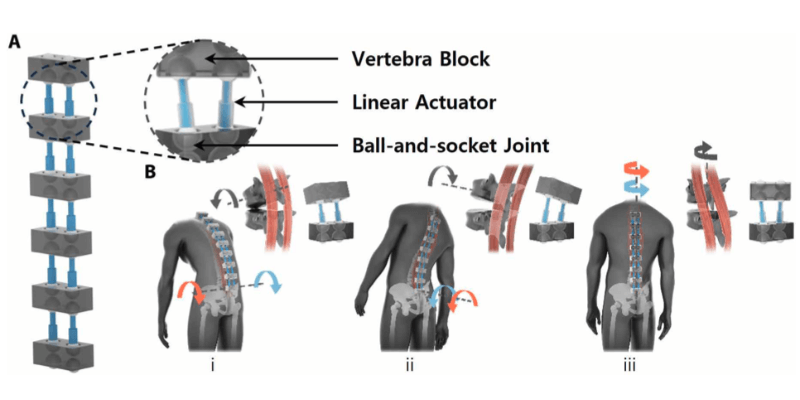
이 혁신은 허리 관절 모터에서 비롯되었으며, 로봇이 몸통을 굽혀 벽 간격에 적응하고 수직 이동 중 안정성을 유지할 수 있게 합니다. 그 결과, 지상 이동과 수직 상승을 원활하게 전환할 수 있는 굴뚝 등반 로봇 개가 탄생했습니다.

로봇의 다리는 CubeMars AK70-10 액추에이터로 구동되며, 최대 24.8 Nm의 토크를 제공합니다. 이 컴팩트하지만 강력한 모터는 다음과 같은 기능을 제공합니다: AK70-10 KV100 로봇 액추에이터
빠른 반응 속도와 낮은 지연 시간으로, 빠른 발 위치 조정과 벽 적응에 필수적입니다;
높은 토크 출력으로 수직 면에 안정적인 압력을 가할 수 있습니다;
준직접 구동 방식의 부드러움으로 진동을 줄이고 매끄러운 등반 주기를 보장합니다.
AK70-10 KV100과 함께 로봇 액추에이터 각 다리 관절에 로봇 액추에이터가 장착되어 있어, KLEIYN은 불균일한 벽 표면에 적응하면서 연속적인 상향 힘을 유지하기 위해 빠른 미세 조정을 수행할 수 있습니다.

진정한 혁신은 CubeMars가 구동하는 허리 관절에 있습니다AK10-9 V2.0 KV60 액추에이터. 인간 등반가의 코어 근육과 마찬가지로, 이 관절은 굴뚝 등반 시 중심 안정 장치 역할을 합니다.
48 Nm 토크 용량—다리 액추에이터의 두 배—으로 두 벽 사이에서 몸통을 지지할 수 있는 힘을 제공합니다;
지속적인 안정성으로, 다리가 역동적으로 움직이는 동안에도 로봇이 안전하게 벽 사이에 고정됩니다;
동적 자세 제어: 낮은 지연 시간 덕분에 등반 주기에 맞춰 몸을 구부리고 펴는 동작을 동기화할 수 있습니다;
기계적 “코어 강도” 효과로, 몸통이 힘을 효율적으로 전달하며 흔들림이나 불안정 없이 작동합니다.
AK10-9 V2.0 KV60과 함께, 허리는 단순한 연결 부위를 넘어 수직 등반 안정성의 핵심이 되며, KLEIYN을 신뢰할 수 있는 굴뚝 등반 사족형 로봇으로 변화시킵니다.
로봇 개의 민첩성과 허리 관절 안정성의 결합은 다양한 가능성을 열어줍니다:
수색 및 구조: 무너진 건물, 수직 통로 또는 좁은 잔해 지역을 등반;
산업 검사: 굴뚝, 환기 덕트 및 좁은 배관 접근;
탐사: 인간이 닿기 어려운 동굴, 균열 및 지질 구조를 탐험;
CubeMars 로봇 액추에이터와 함께, KLEIYN은 허리 관절을 갖춘 사족형 로봇이 이전에 어떤 로봇 개도 갈 수 없었던 곳으로 나아갈 수 있음을 보여줍니다.
KLEIYN은 사족형 로봇 개의 다음 도약을 보여줍니다—지상에만 머무르지 않고 벽을 오릅니다. 민첩한 다리 제어를 위해 CubeMars AK70-10 KV100 로봇 액추에이터와 강력하고 안정적인 허리 관절을 위한 AK10-9 로봇 액추에이터로 구동되며, 로봇은 부드럽고 강력하며 신뢰할 수 있는 굴뚝 등반을 실현합니다.
CubeMars는 고토크, 저지연, 준직접 구동 액추에이터를 통해 로봇 분야를 선도하며, 이동성, 민첩성 및 적응성에서 혁신을 가능하게 합니다.
CubeMars 로봇 액추에이터: 로봇 개가 등반할 힘을 얻는 곳.