CubeMars 계정 만들기

CubeMars 짐벌 모터 GL100은 소형, 경량, 낮은 코깅, 낮은 전력 소모를 특징으로 하며, 고급 짐벌 시스템용으로 특별히 설계되었습니다. 또한 AlexMos 짐벌 컨트롤러와 호환됩니다. 짐벌 시스템, 드론 포드, 자율주행 등 다양한 장면에 적합하며, 연속적이고 부드러운 경험을 제공합니다.
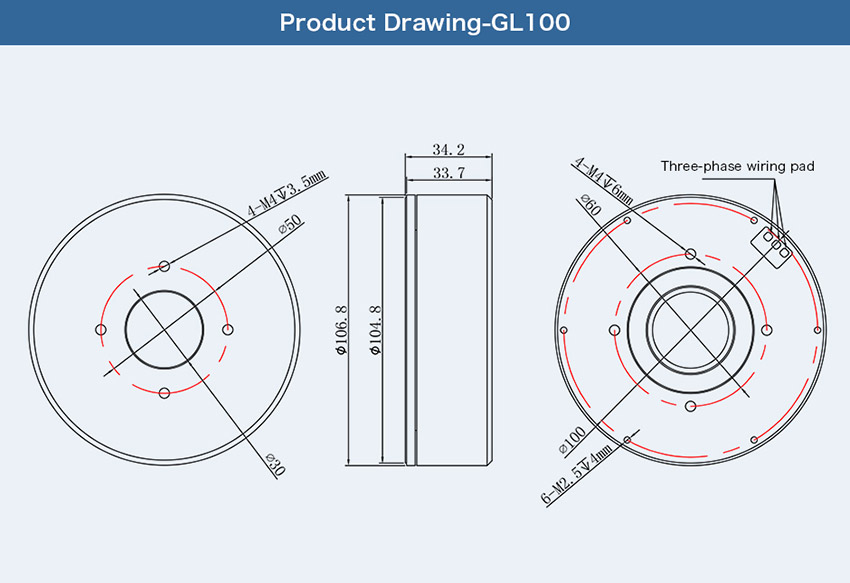
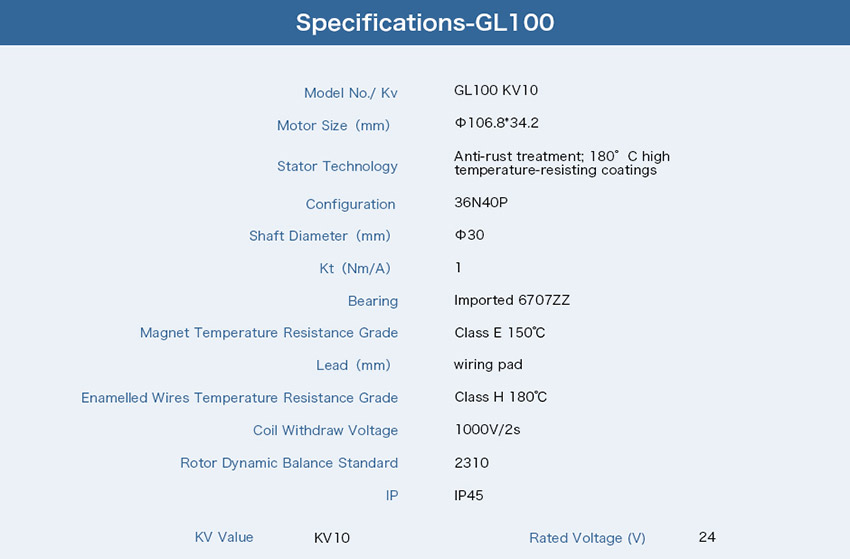
GL100 KV10 짐벌 모터 는 30mm 속이 빈 샤프트를 가진 대형 홀 설계를 채택하여 신호 및 전원 케이블 통과가 편리합니다. 코깅 토크가 낮고 제어가 세밀하여 제어 시스템과 상호작용하기 쉽습니다.
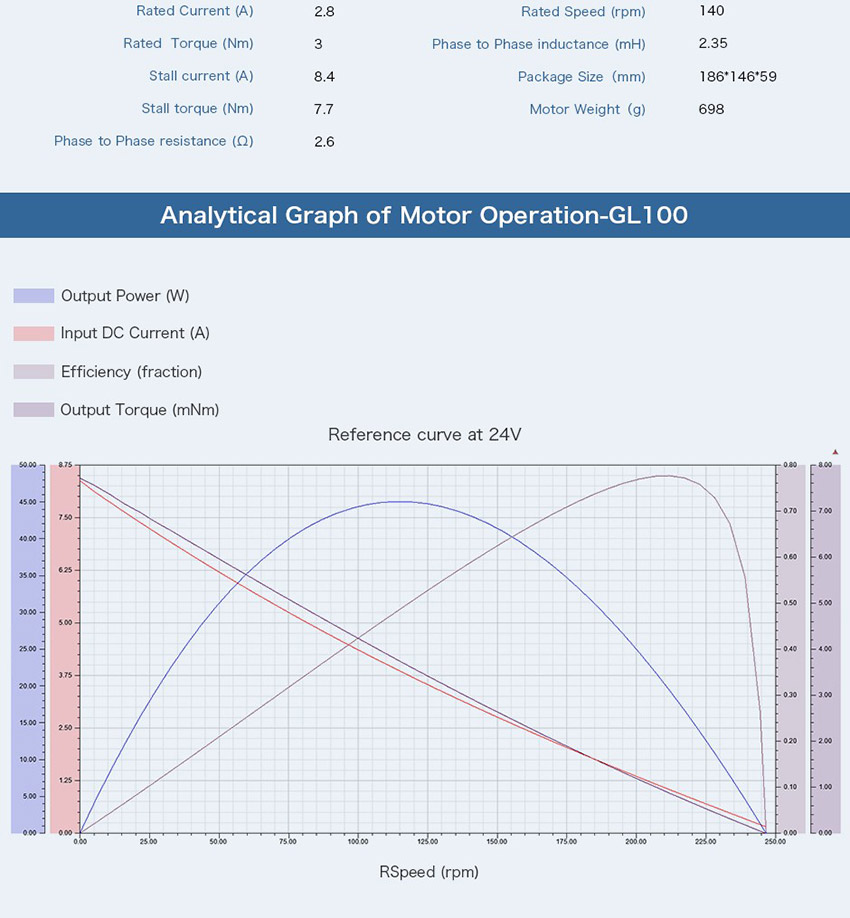
GL100 KV10 의 전체 무게는 단 698g으로, 소형이면서 경량입니다. 또한 목표 지향적 전자기 설계, 낮은 전력 소모, 저소음, 장시간 운용 적합, 높은 방수 및 방진 성능 등 고급 짐벌 시스템을 위해 특별히 설계되었습니다.