CubeMars 계정 만들기

로봇 개(4족 로봇)를 평가할 때 보행 패턴은 이야기의 일부에 불과합니다. 진정한 도전은 울퉁불퉁한 지형에 적응하고 실시간으로 동적 안정성을 유지하는 능력에 있습니다.
최근 15세의 공학 애호가 Arsenii Mironov는 자신만의 로봇 개를 제작하고 인상적인 균형 테스트를 진행했습니다. 그는 로봇을 기울일 수 있는 나무 판 위에 올려 한쪽을 점차 들어 올려 경사를 만들었습니다. 경사가 변함에도 불구하고 로봇은 미끄러지거나 넘어지지 않고 안정적인 자세를 유지했습니다 — 흔들림 없는 탄탄한 안정성이었습니다.
이 테스트는 하드웨어만을 평가한 것이 아니라, 제어 알고리즘에 대한 스트레스 테스트이기도 했으며 로봇 액추에이터. 모든 미세한 움직임에는 다음이 요구되었습니다:
빠른 토크 응답
정밀한 위치 조정
부드럽고 제어 가능한 출력
이 요소들이 없었다면, 최고의 제어 전략조차도 로봇의 균형을 유지하기에 충분하지 않았을 것입니다.
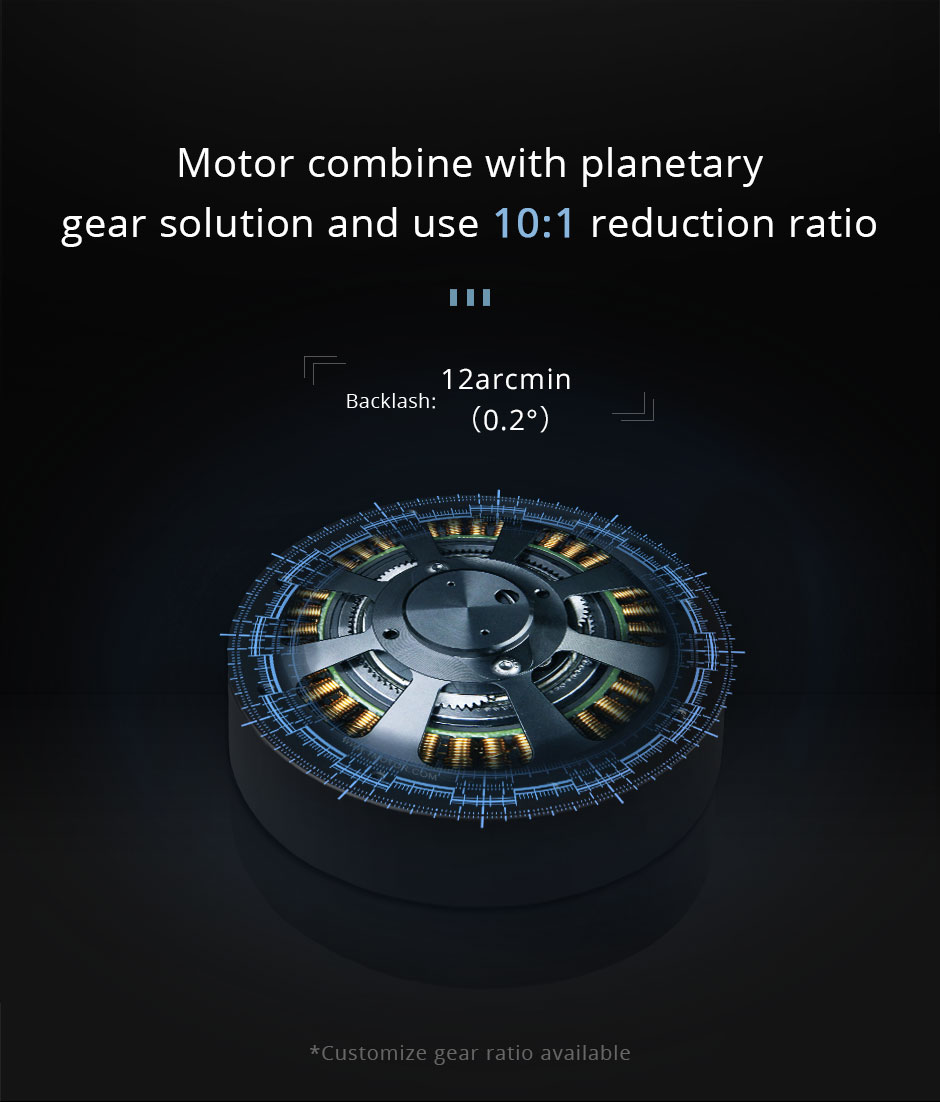
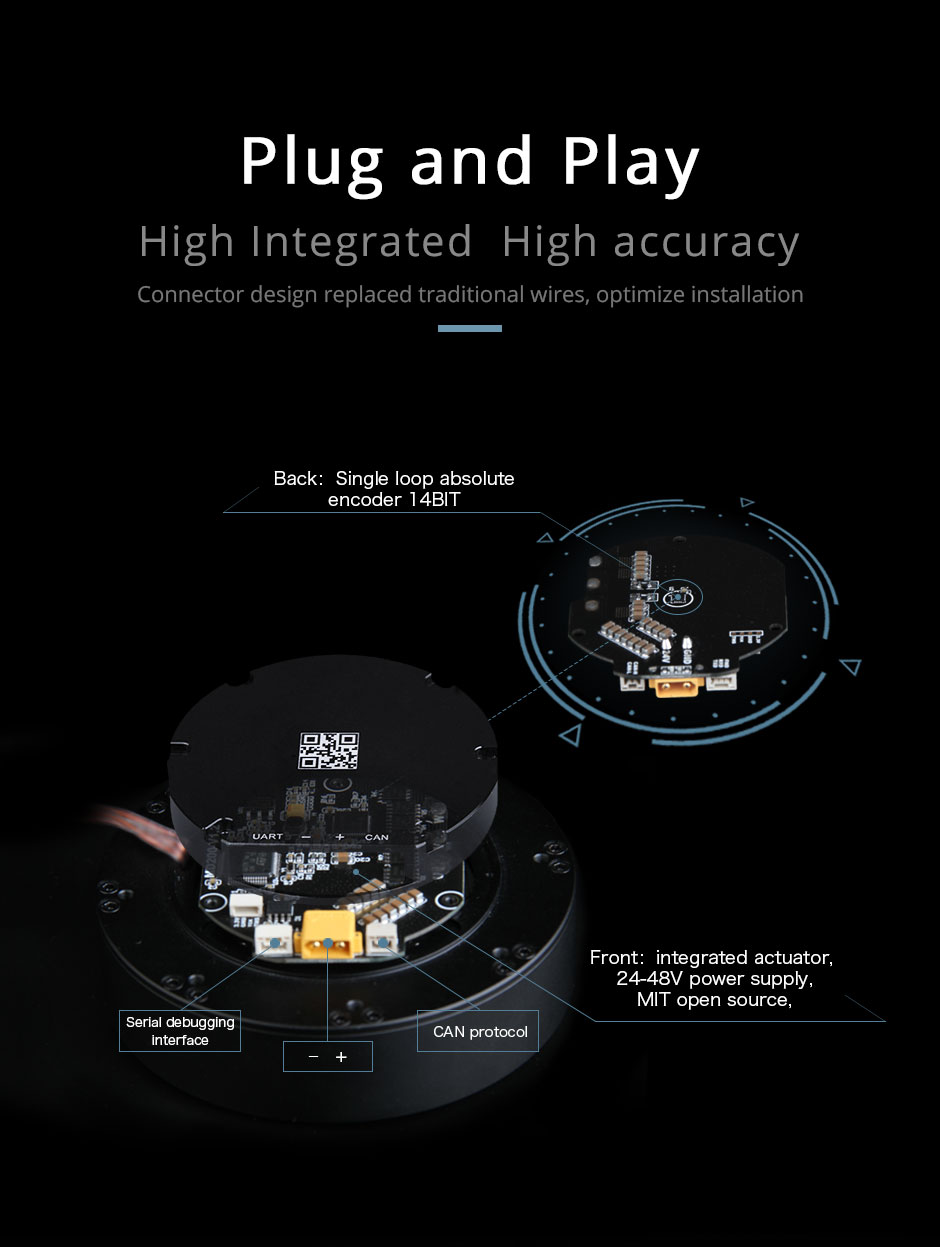
자신의 로봇 개 12개 관절을 구동하기 위해, Arsenii는 CubeMars를 선택했습니다 AK70-10 KV100 로봇 액추에이터 - 24/48V, 10:1 기어비, 까다로운 응용 분야에서의 성능으로 잘 알려짐:
높은 토크 밀도: 동적 부하를 처리하기 위한 최대 토크 24.8 Nm.
초고속 응답: 정밀하고 고주파 조정을 위한 낮은 지연 시간.
정밀 피드백: 서브밀리미터 정확도를 갖춘 내장 14비트 인코더.
컴팩트 통합: 모터, 유성 기어박스, 드라이버가 좁은 공간에 맞게 결합됨.
기울기 테스트에서, AK70-10 KV100 로봇 액추에이터는 반사 수준의 반응을 가진 로봇 근육처럼 작동했습니다. 로봇의 균형이 약간 이동했을 때, 로봇 개 모터 즉시 조정되어 로봇을 안정된 위치로 되돌립니다. 컨트롤러와 액추에이터 간의 이 폐쇄 루프 시너지 효과가 동적 지형을 제어하는 핵심입니다.
CubeMars에서는 Arsenii Mironov와 같은 젊은 혁신가들이 로봇공학의 한계를 확장하는 모습을 보며 자부심을 느낍니다. 우리는 로봇 개, 4족 로봇 등 다양한 응용을 위한 고성능 액추에이터를 제공하며, 차세대 창작자들이 혁신을 이어갈 수 있도록 지원합니다.


