La serie RO completamente rediseñada
REVELANDO UN
NUEVO ICONO
PAR DE COGGING ULTRABAJO
50

GRAN EJE HUECO
DISEÑO DE ORIFICIO PASANTE
















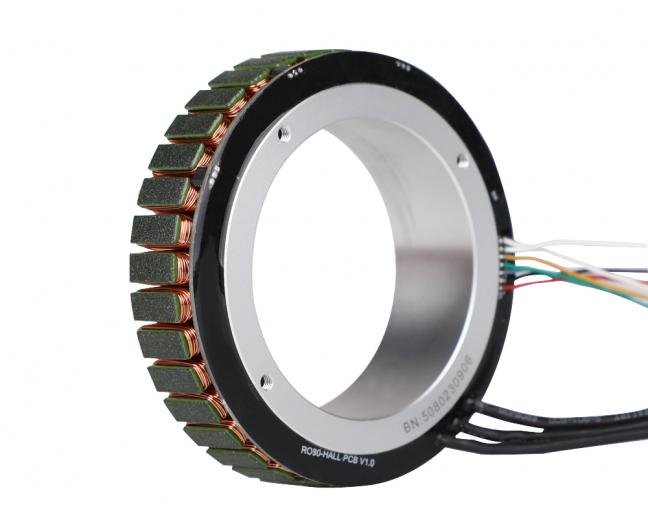

El CubeMars RO80-KV105 Standard es un motor de par outrunner sin carcasa (frameless) de alto rendimiento de la serie RO, diseñado como una solución de accionamiento de precisión para articulaciones robóticas, exoesqueletos y otros sistemas electromecánicos exigentes.
Con voltaje nominal de 48 V, incorpora un diseño de par de cogging ultra bajo y un eje hueco de gran diámetro, lo que permite el paso sencillo de cableado o la integración directa con ejes de transmisión y reductores. De serie, está equipado con sensores Hall y sensor de temperatura, proporcionando una retroalimentación precisa de la posición del rotor y monitoreo térmico en tiempo real para mejorar la precisión de control y la seguridad del sistema.
Con un par continuo de 1.3 N·m, par pico de hasta 4 N·m y un peso total de solo 352 g, el RO80-KV105 está optimizado para aplicaciones donde el espacio es limitado pero se requiere alta respuesta dinámica, movimiento suave y fiabilidad excepcional, como exoesqueletos, brazos robóticos colaborativos (cobots), robótica médica y aeroespacial, entre otros.
Dimensiones del motor: Φ92.6 × 26.4 mm
Peso: 352 g
Par pico: 4 N·m
Velocidad en vacío: 5040 rpm
Par de cogging ultra bajo: Reducción de aproximadamente un 50 % en comparación con motores convencionales, garantizando un funcionamiento extremadamente suave a bajas velocidades y durante el arranque
Diseño de eje hueco de gran diámetro: La amplia apertura central permite el paso de cables de señal y alimentación o el acoplamiento directo con ejes de salida y reductores armónicos, mejorando significativamente la flexibilidad de integración mecánica
Sensores Hall y de temperatura integrados: Permiten una conmutación precisa y protección térmica en tiempo real, aumentando la fiabilidad general y la seguridad operativa del sistema
Carcasa de aleación de aluminio y diseño compacto: Estructura ligera y robusta con excelente resistencia a la corrosión y a impactos; con un peso total de ~352 g, es ideal para instalaciones con restricciones de espacio
Amplia compatibilidad de aplicaciones: Adecuado para exoesqueletos, brazos colaborativos, robótica médica y aeroespacial, robots cuadrúpedos y sistemas de tracción para AGV
Motor de par outrunner frameless RO80-KV105 Standard (con sensores Hall) ×1
Certificado de conformidad ×1
| RO80 KV105 – Versión estándar |
 |
| RO80 KV105 – Versión Lite |
 |
| RO80 KV105 – Versión estándar | |||
| Aplicación | CobotArm | Clase de aislamiento | F |
| Método de accionamiento | FOC | Tensión soportada de aislamiento | 500V |
| Temperatura de funcionamiento | -20℃~50℃ | Resistencia de aislamiento | 10MΩ |
| Tipo de devanado | delta | Par de cogging | 24N.mm |
| Pares de polos | 21 | Inercia del rotor (gcm²) | 2612gcm² |
| Relación par máximo-peso | 11.36Nm/kg | Peso (g) | 352g |
| Peso del rotor | 148g | Tecnología del Estator | 204g |
| Cable de temperatura del sensor Hall | 30#Cable de silicona AWG 100±5mm Tinning 5±2mm | Cable de salida | Salida de cables del motor trifásico: lambre esmaltado con salida directa, longitud 100±5 mm, estañado 5±2 mm |
| Diámetro del cable trifásico | 3.5mm | ||
| RO80 KV105 – Versión Lite | |||
| Aplicación | Cobot Arm | Clase de aislamiento | F |
| Método de accionamiento | FOC | Tensión soportada de aislamiento | 500V |
| Temperatura de funcionamiento | -20℃~50℃ | Resistencia de aislamiento | 10MΩ |
| Tipo de devanado | delta | Par de cogging | 24N.mm |
| Pares de polos | 21 | Inercia del rotor (gcm²) | 1600gcm² |
| Peso del rotor | 85g | Peso (g) | 265g |
| Altura máxima del saliente del cable esmaltado | 6mm | Tecnología del Estator | 180g |
| Diámetro del cable trifásico | 3.5mm | Cable de salida | Salida de cables del motor trifásico: alambre esmaltado con salida directa, longitud 100±5 mm, estañado 5±2 mm |
| Parámetros eléctricos | |||
| Tensión nominal (V) | 48V | KE (V/krpm) | 9.07V/krpm |
| Velocidad sin carga (rpm) | 5040rpm | Resistencia entre fases (mΩ) | 120mΩ |
| Par nominal (Nm) | 1.3Nm | Inductancia entre fases (μH) | 103μH |
| Velocidad nominal (rpm) | 3600rpm | Constante del motor (Nm/√W) | 0.25Nm/√W |
| Corriente nominal (ADC) | 15ADC | Constante de tiempo electromecánica (ms) | 2.95ms |
| Par pico (Nm) | 4Nm | Constante de tiempo eléctrica ms | 0.86ms |
| Corriente pico (ADC) | 50ADC | KT (Nm/A) | 0.087Nm/A |
| KV (rpm/V) | 105rpm/V | ||

| categoría | Modelo | Tensión nominal (V) | Potencia nominal (W) | Par nominal (Nm) | Corriente nominal (A) | Velocidad nominal (rpm) | Par pico (Nm) | Corriente pico (A) | Velocidad sin carga (RPM) | Resistencia entre fases (mΩ) | Inductancia entre fases (μH) | Pares de polos | Peso (G) | Tamaño (diámetro × longitud) MM | Sensor Hall | Sensor de temperatura | Operación |
| Motor de par Outrunner Frameless RO (rotor externo) | RO100 KV55 versión estándar (con sensores Hall) | 48 | 838 | 4 | 20 | 2000 | 12 | 62 | 2550 | 143 | 137 | 21 | 710 | Ф113.5*36.2 | Yes | Yes |  |
| Motor de par Outrunner Frameless RO (rotor externo) | RO100 KV55 Lite without hall | 48 | 838 | 4 | 20 | 2000 | 12 | 62 | 2550 | 143 | 137 | 21 | 525 | Ф108.3*28 | No | No | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO80 KV105 Estándar con Hall | 48 | 490 | 1.3 | 15 | 3600 | 4 | 50 | 5040 | 120 | 103 | 21 | 352 | Ф92.6*26.4 | Yes | Yes | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO80 KV105 Lite sin sensor Hall | 48 | 490 | 1.3 | 15 | 3600 | 4 | 50 | 5040 | 120 | 103 | 21 | 265 | Ф88.6*17.7 | No | No | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO60 KV115 – Versión estándar con sensores Hall | 48 | 352 | 0.8 | 8.5 | 4200 | 2.4 | 40 | 5520 | 300 | 395 | 14 | 248 | Ф73.8*23 | Yes | Yes | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO60 KV115 Lite sin Hall | 48 | 352 | 0.8 | 8.5 | 4200 | 2.4 | 40 | 5520 | 300 | 395 | 14 | 195 | Ф70.5*15 | No | No | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO40 KV140 Lite | 24 | 51 | 0.2 | 2.85 | 2450 | 0.6 | 11.6 | 3400 | 1700 | 580 | 14 | 60 | Ф46.3*13 | No | No | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO50 KV108 Lite | 24 | 66 | 0.3 | 3.4 | 2100 | 0.9 | 0.9 | 2600 | 1035 | 460 | 14 | 105 | Ф41.7*14.5 | No | No | |



