La serie RO completamente rediseñada
REVELANDO UN
NUEVO ICONO
PAR DE COGGING ULTRABAJO
50

GRAN EJE HUECO
DISEÑO DE ORIFICIO PASANTE












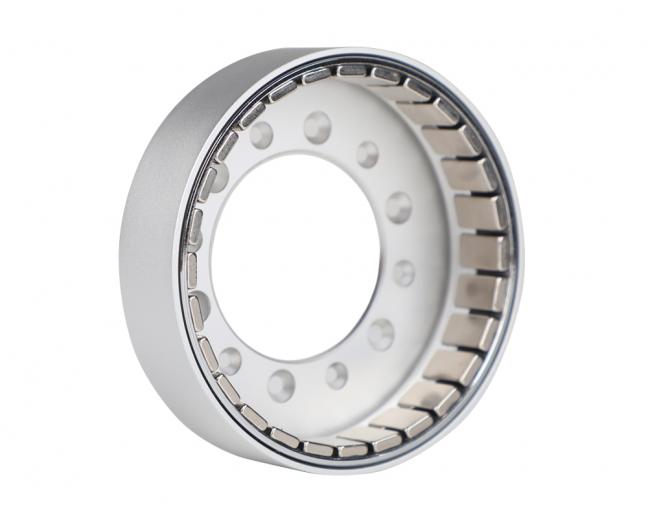





El CubeMars RO60 KV115 es un motor de par outrunner sin carcasa (frameless) de nuevo lanzamiento dentro de la serie RO, equipado de serie con sensores Hall integrados. Está diseñado específicamente para aplicaciones de alto rendimiento como articulaciones robóticas, exoesqueletos, brazos robóticos colaborativos (cobots), dispositivos médicos y sistemas aeroespaciales.
Funcionando a un voltaje nominal de 48 V, este motor incorpora un diseño de par de cogging ultra bajo y un eje hueco de gran diámetro, lo que permite un reemplazo flexible del eje y múltiples configuraciones de montaje, como integración directa con reductores, paso de cableado por el centro o transmisión directa del eje.Los sensores Hall y de temperatura integrados proporcionan información precisa de la posición del rotor y supervisión térmica en tiempo real, mejorando la precisión de control y la seguridad del sistema.
Con un par continuo de 0.8 N·m (hasta 2.4 N·m de par pico) y un peso total de solo 248 g, el RO60 KV115 ofrece una respuesta dinámica excepcional y una gran estabilidad, siendo ideal para plataformas robóticas con limitaciones estrictas de espacio.
Dimensiones del motor: Φ73.8 × 23 mm
Peso: 248 g
Par pico: 2.4 N·m
Velocidad en vacío: 5520 rpm
Par de cogging ultra bajo: Reducción de aproximadamente un 50 % frente a motores de su misma categoría, garantizando un funcionamiento más suave a baja velocidad y mayor precisión de control
Diseño de eje hueco de gran diámetro: Permite el paso de cables, ejes de transmisión o la conexión directa con reductores
Sensores Hall y de temperatura integrados: Aseguran una conmutación precisa y protección térmica en tiempo real, mejorando la fiabilidad y seguridad del sistema
Compacto y ligero: Con un peso aproximado de 248 g, es ideal para aplicaciones con estrictos requisitos de espacio y peso
Amplia compatibilidad de aplicaciones: Adecuado para exoesqueletos, brazos colaborativos, robots médicos, robots cuadrúpedos, AGV de inspección y más
Motor de par outrunner frameless RO60 KV115 (con sensores Hall) ×1
Certificado de conformidad ×1
| RO60 KV 115 – Versión estándar |
 |
| RO60 KV115 – Versión Lite |
 |
| RO60 KV 115 – Versión estándar | |||
| Aplicación | Cobot Arm | Clase de aislamiento | F |
| Método de accionamiento | FOC | Tensión soportada de aislamiento | 500V |
| Temperatura de funcionamiento | -20℃~50℃ | Resistencia de aislamiento | 10MΩ |
| Tipo de devanado | star | Par de cogging | 15N.mm |
| Pares de polos | 14 | Inercia del rotor (gcm²) | 1161gcm² |
| Relación par máximo-peso | 9.68Nm/kg | Peso (g) | 248g |
| Peso del rotor | 105g | Tecnología del Estator | 143g |
| Cable de temperatura del sensor Hall | 30#Cable de silicona AWG100±5mm Tinning5±2mm | Cable de salida | Salida de cables del motor trifásico: alambre esmaltado con salida directa, longitud 100±5 mm, estañado 5±2 mm |
| Diámetro del cable trifásico | 3mm | ||
| RO60 KV115 – Versión Lite | |||
| Aplicación | Cobot Arm | Clase de aislamiento | F |
| Método de accionamiento | FOC | Tensión soportada de aislamiento | 500V |
| Temperatura de funcionamiento | -20℃~50℃ | Resistencia de aislamiento | 10MΩ |
| Tipo de devanado | star | Par de cogging | 15N.mm |
| Pares de polos | 14 | Inercia del rotor (gcm²) | 800gcm² |
| Peso del rotor | 70g | Peso (g) | 195g |
| Maximum Height of Enameled WireBulge | 5mm | Tecnología del Estator | 125g |
| Diámetro del cable trifásico | 3mm | Cable de salida | Salida de cables del motor trifásico: alambre esmaltado con salida directa, longitud 100±5 mm, estañado 5±2 mm |
| Parámetros eléctricos | |||
| Tensión nominal (V) | 48V | KE (V/krpm) | 8.28V/krpm |
| No-Load Speed | 5520rpm | Resistencia entre fases (mΩ) | 300mΩ |
| Par nominal (Nm) | 0.8Nm | Inductancia entre fases (μH) | 395μH |
| Velocidad nominal (rpm) | 4200rpm | Constante del motor (Nm/√W) | 0.17Nm/√W |
| Corriente nominal (ADC) | 8.5ADC | Constante de tiempo electromecánica (ms) | 2.86ms |
| Par pico (Nm) | 2.4Nm | Constante de tiempo eléctrica ms | 1.32ms |
| Corriente pico (ADC) | 40ADC | KT (Nm/A) | 0.094Nm/A |
| KV (rpm/V) | 115rpm/V | ||

| categoría | Modelo | Tensión nominal (V) | Potencia nominal (W) | Par nominal (Nm) | Corriente nominal (A) | Velocidad nominal (rpm) | Par pico (Nm) | Corriente pico (A) | Velocidad sin carga (RPM) | Resistencia entre fases (mΩ) | Inductancia entre fases (μH) | Pares de polos | Peso (G) | Tamaño (diámetro × longitud) MM | Sensor Hall | Sensor de temperatura | Operación |
| Motor de par Outrunner Frameless RO (rotor externo) | RO100 KV55 versión estándar (con sensores Hall) | 48 | 838 | 4 | 20 | 2000 | 12 | 62 | 2550 | 143 | 137 | 21 | 710 | Ф113.5*36.2 | Yes | Yes |  |
| Motor de par Outrunner Frameless RO (rotor externo) | RO100 KV55 Lite without hall | 48 | 838 | 4 | 20 | 2000 | 12 | 62 | 2550 | 143 | 137 | 21 | 525 | Ф108.3*28 | No | No | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO80 KV105 Estándar con Hall | 48 | 490 | 1.3 | 15 | 3600 | 4 | 50 | 5040 | 120 | 103 | 21 | 352 | Ф92.6*26.4 | Yes | Yes | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO80 KV105 Lite sin sensor Hall | 48 | 490 | 1.3 | 15 | 3600 | 4 | 50 | 5040 | 120 | 103 | 21 | 265 | Ф88.6*17.7 | No | No | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO60 KV115 – Versión estándar con sensores Hall | 48 | 352 | 0.8 | 8.5 | 4200 | 2.4 | 40 | 5520 | 300 | 395 | 14 | 248 | Ф73.8*23 | Yes | Yes | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO60 KV115 Lite sin Hall | 48 | 352 | 0.8 | 8.5 | 4200 | 2.4 | 40 | 5520 | 300 | 395 | 14 | 195 | Ф70.5*15 | No | No | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO40 KV140 Lite | 24 | 51 | 0.2 | 2.85 | 2450 | 0.6 | 11.6 | 3400 | 1700 | 580 | 14 | 60 | Ф46.3*13 | No | No | |
| Motor de par Outrunner Frameless RO (rotor externo) | RO50 KV108 Lite | 24 | 66 | 0.3 | 3.4 | 2100 | 0.9 | 0.9 | 2600 | 1035 | 460 | 14 | 105 | Ф41.7*14.5 | No | No | |



