Crear su cuenta de CubeMars













El GL35 KV100 es un motor brushless DC para gimbales, desarrollado por CubeMars para gimbales y plataformas rotativas de alta precisión. Destaca por su diseño compacto, estructura ligera, eje hueco, bajo par de cogging y alta compatibilidad con controladores AlexMos, lo que permite un control suave y un consumo energético reducido.Su gran orificio central pasante facilita el enrutamiento de cables o la integración de anillos rozantes (slip rings), lo que lo convierte en una solución ideal para aplicaciones que requieren rotación continua y transmisión de señales, como gimbales de cámara, cabezas de escaneo radar y módulos rotativos donde la alta respuesta dinámica y la precisión son esenciales.
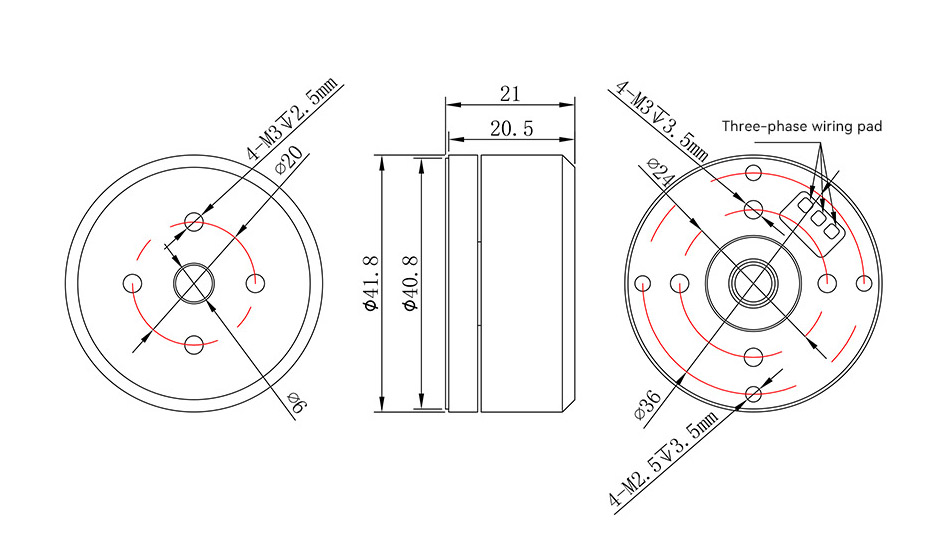
Dimensiones del motor: Ф41.8*21mm
Diámetro del orificio pasante: 6mm
Peso del motor: 90g
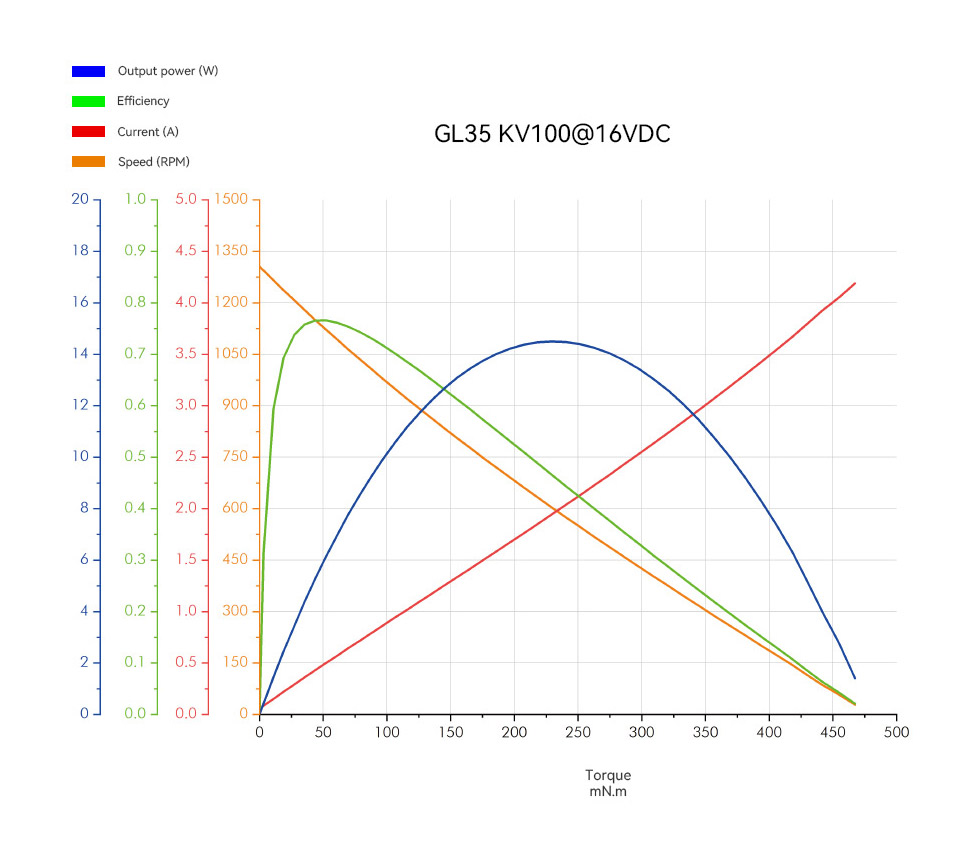
Par máximo: 0.46Nm
Velocidad en vacío: 1320rpm
Diseño ligero: Con un peso aproximado de 90 g, es ideal para sistemas de gimbal o pods con restricciones de espacio y peso
Diseño de bajo cogging: Garantiza una entrega de par suave, cumpliendo los requisitos de seguimiento y estabilización de alta precisión
Gran orificio central pasante: Permite el paso sencillo de cables de señal y alimentación, ideal para configuraciones con anillos rozantes o mecanismos rotativos
Alta compatibilidad: Funciona de forma estable con controladores de gimbal AlexMos y diversas soluciones de accionamiento para gimbales
Resistencia al polvo y al agua IP45: Adecuado para entornos exteriores y aplicaciones exigentes
Motor de gimbal GL35 KV100 ×1





| Aplicación | Gimbal, Radar | Tensión soportada de aislamiento | 500V 5mA/2s |
| Método de accionamiento | FOC | Resistencia de aislamiento | 500V10MΩ |
| Temperatura de funcionamiento | -20℃~50℃ | Número de fases | 3 |
| Tipo de devanado | star | Pares de polos | 7 |
| Clase de aislamiento | H | ||
| Parámetros eléctricos | |||
| Tensión nominal (V) | 16 | Ke (V/krpm) | 11.54 |
| Velocidad sin carga (rpm) | 1320 | Resistencia entre fases (mΩ) | 3600 |
| Par nominal (Nm) | 0.15 | Inductancia entre fases (μH) | 2100 |
| Velocidad nominal (rpm) | 815 | Inercia del rotor (gcm²) | 61 |
| Corriente nominal (ADC) | 1.3 | Constante del motor (Nm/√W) | 0.060610322 |
| Par pico (Nm) | 0.46 | Constante de tiempo electromecánica (ms) | 1.66 |
| Corriente pico (ADC) | 4 | Constante de tiempo eléctrica ms | 0.58 |
| Kv (rpm/V) | 82.5 | Peso (g) | 90 |
| Kt (Nm/A) | 0.115 | Relación máxima par/peso (Nm/kg) | 5.11 |
| categoría | Modelo | Tensión nominal (V) | Potencia nominal (W) | Par nominal (Nm) | Corriente nominal (A) | Velocidad nominal (RPM) | Par pico (Nm) | Corriente pico (A) | Velocidad sin carga (RPM) | Resistencia entre fases (mΩ) | Inductancia entre fases (μH) | Pares de polos | Peso (G) | Tamaño (diámetro × longitud) MM | Operación |
| Motor GL II para Gimbal | GL40 II KV82.5 | 16 | 19 | 0.25 | 1.88 | 697 | 0.68 | 5.22 | 1388 | 3000 | 1320 | 14 | 125 | Ф46.1*33.5 |  |
| Motor GL II para Gimbal | GL60 II KV28 | 16 | 10 | 0.6 | 1.56 | 153 | 1 | 2.75 | 448 | 5800 | 6000 | 28 | 276 | φ70.5*33.6 | |
| Motor GL para gimbal | GL30 KV290 | 12 | 16 | 0.08 | 2.13 | 1990 | 0.28 | 7.4 | 3060 | 1530 | 330 | 7 | 41 | Ф34.5*15.7 | |
| Motor GL para gimbal | GL35 KV100 | 16 | 13 | 0.15 | 1.3 | 815 | 0.46 | 4 | 1320 | 23600 | 2100 | 7 | 90 | Ф41.8*21 | |
| Motor GL para gimbal | GL40 KV70 | 16 | 12 | 0.25 | 1.62 | 430 | 0.5 | 3.3 | 1015 | 4500 | 1800 | 14 | 107 | Ф46.5*21.5 | |
| Motor GL para gimbal | GL60 KV25 | 24 | 20 | 0.6 | 1.35 | 310 | 1.75 | 4 | 516 | 5500 | 2720 | 14 | 230 | Ф69*22.3 | |
| Motor GL para gimbal | GL80 KV30 | 24 | 48 | 1 | 2.8 | 450 | 2.9 | 8.2 | 650 | 1800 | 1100 | 21 | 312 | Ф87*22.3 | |
| Motor GL para gimbal | GL80 KV60 | 24 | 106 | 1 | 5.6 | 1010 | 2.9 | 16.3 | 1300 | 450 | 270 | 21 | 315 | Ф87*22.3 | |
| Motor GL para gimbal | GL100 KV10 | 24 | 41 | 3 | 2.9 | 130 | 7.7 | 7.8 | 223 | 2650 | 2350 | 20 | 698 | Ф106.8*34.2 | |
 Motor de cardán GL35 sin codificador — dibujo 3D (STEP, ZIP)
Motor de cardán GL35 sin codificador — dibujo 3D (STEP, ZIP) 

