Crear su cuenta de CubeMars









El CubeMars GL100 KV10 es un motor brushless de alta precisión para gimbales de la serie GL de CubeMars, diseñado específicamente para sistemas de gimbal de alta gama, módulos rotativos de percepción para conducción autónoma y cabezales de escaneo por radar. Incorpora una estructura de eje hueco de gran diámetro, un diseño de bajo par de cogging y un formato compacto, ofreciendo un rendimiento fiable con un peso aproximado de 698 g.Con una clasificación de protección IP45 contra polvo y salpicaduras de agua, este motor es ideal para aplicaciones que requieren funcionamiento estable, fiable y continuo a largo plazo en entornos exigentes.
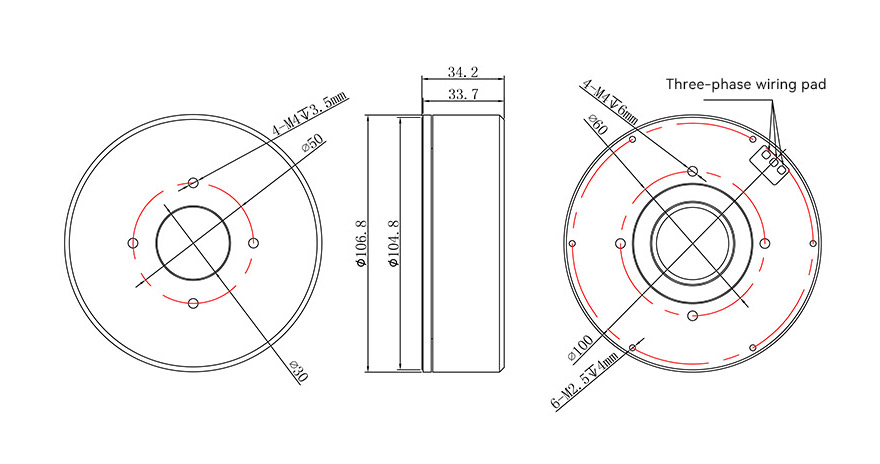
Dimensiones del motor: Ф106.8*34.2mm
Diámetro del orificio pasant: 30mm
Peso del motor: 698g
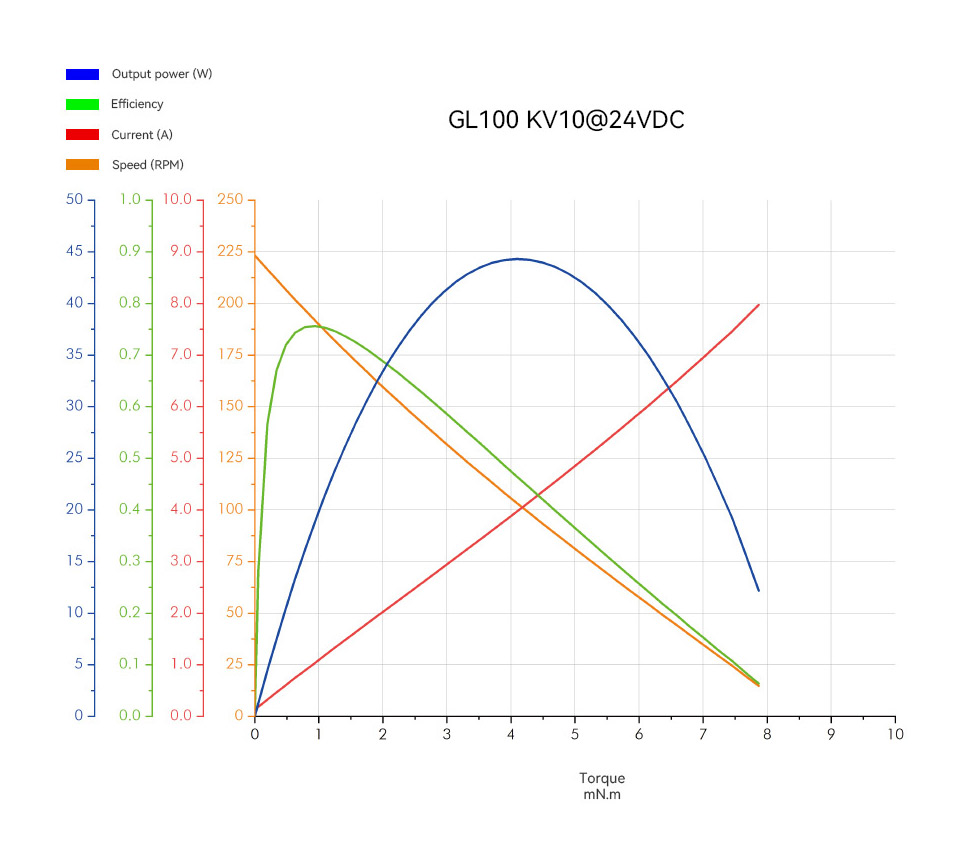
Par máximo: 7.7Nm
Velocidad en vacío: 223rpm
Diseño de eje hueco de gran diámetro: Facilita el paso de cables de señal y alimentación o la integración con anillos rozantes (slip rings), ideal para sistemas rotativos complejos
Bajo cogging / salida suave: Optimizado específicamente para aplicaciones de gimbal, proporciona un control más fino y una respuesta más rápida
Alta capacidad de par: Par nominal de aproximadamente 3 Nm y par máximo de 7,7 Nm, capaz de accionar cargas pesadas con alta precisión
Compacto y potente: Con un peso de solo ~698 g y dimensiones de Ø106,8 × 34,2 mm, ofrece un alto rendimiento en instalaciones con espacio limitado
Funcionamiento fiable: La protección IP45 garantiza durabilidad en entornos polvorientos y configuraciones rotativas complejas
Motor de gimbal GL100 KV10 ×1
Certificado de conformidad ×1




| Aplicación | Gimbal, Radar | Tensión soportada de aislamiento | 1000V 5mA/2s |
| Método de accionamiento | FOC | Resistencia de aislamiento | 1000V10MΩ |
| Temperatura de funcionamiento | -20℃~50℃ | Número de fases | 3 |
| Tipo de devanado | star | Pares de polos | 20 |
| Clase de aislamiento | H | ||
| Parámetros eléctricos | |||
| Tensión nominal (V) | 24 | Ke (V/krpm) | 102.4 |
| Velocidad sin carga (rpm) | 223 | Resistencia entre fases (mΩ) | 2650 |
| Par nominal (Nm) | 3 | Inductancia entre fases (μH) | 2350 |
| Velocidad nominal (rpm) | 130 | Inercia del rotor (gcm²) | 2310 |
| Corriente nominal (ADC) | 2.9 | Constante del motor (Nm/√W) | 0.63272397 |
| Par pico (Nm) | 7.7 | Constante de tiempo electromecánica (ms) | 0.58 |
| Corriente pico (ADC) | 7.8 | Constante de tiempo eléctrica ms | 0.89 |
| Kv (rpm/V) | 9.3 | Peso (g) | 698 |
| Kt (Nm/A) | 1.030 | Relación máxima par/peso (Nm/kg) | 11.03 |
| categoría | Modelo | Tensión nominal (V) | Potencia nominal (W) | Par nominal (Nm) | Corriente nominal (A) | Velocidad nominal (RPM) | Par pico (Nm) | Corriente pico (A) | Velocidad sin carga (RPM) | Resistencia entre fases (mΩ) | Inductancia entre fases (μH) | Pares de polos | Peso (G) | Tamaño (diámetro × longitud) MM | Operación |
| Motor GL II para Gimbal | GL40 II KV82.5 | 16 | 19 | 0.25 | 1.88 | 697 | 0.68 | 5.22 | 1388 | 3000 | 1320 | 14 | 125 | Ф46.1*33.5 |  |
| Motor GL II para Gimbal | GL60 II KV28 | 16 | 10 | 0.6 | 1.56 | 153 | 1 | 2.75 | 448 | 5800 | 6000 | 28 | 276 | φ70.5*33.6 | |
| Motor GL para gimbal | GL30 KV290 | 12 | 16 | 0.08 | 2.13 | 1990 | 0.28 | 7.4 | 3060 | 1530 | 330 | 7 | 41 | Ф34.5*15.7 | |
| Motor GL para gimbal | GL35 KV100 | 16 | 13 | 0.15 | 1.3 | 815 | 0.46 | 4 | 1320 | 23600 | 2100 | 7 | 90 | Ф41.8*21 | |
| Motor GL para gimbal | GL40 KV70 | 16 | 12 | 0.25 | 1.62 | 430 | 0.5 | 3.3 | 1015 | 4500 | 1800 | 14 | 107 | Ф46.5*21.5 | |
| Motor GL para gimbal | GL60 KV25 | 24 | 20 | 0.6 | 1.35 | 310 | 1.75 | 4 | 516 | 5500 | 2720 | 14 | 230 | Ф69*22.3 | |
| Motor GL para gimbal | GL80 KV30 | 24 | 48 | 1 | 2.8 | 450 | 2.9 | 8.2 | 650 | 1800 | 1100 | 21 | 312 | Ф87*22.3 | |
| Motor GL para gimbal | GL80 KV60 | 24 | 106 | 1 | 5.6 | 1010 | 2.9 | 16.3 | 1300 | 450 | 270 | 21 | 315 | Ф87*22.3 | |
| Motor GL para gimbal | GL100 KV10 | 24 | 41 | 3 | 2.9 | 130 | 7.7 | 7.8 | 223 | 2650 | 2350 | 20 | 698 | Ф106.8*34.2 | |
 Motor de cardán GL100 — dibujo 3D (STEP, ZIP)
Motor de cardán GL100 — dibujo 3D (STEP, ZIP) 

