Crear su cuenta de CubeMars

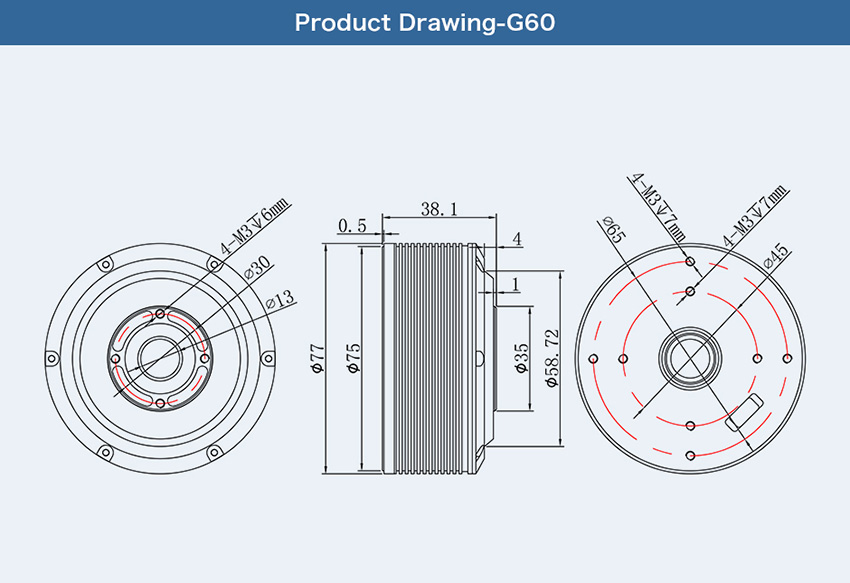
El motor gimbal Innerunning G60 adopta un diseño de eje hueco grande, que se puede integrar con un anillo deslizante eléctrico, facilitando el paso de los cables. Su estructura general es ligera y bien integrada, con baja inercia de rotación, lo que permite lograr una respuesta rápida.
Cubemars ha desarrollado una versión estándar y una versión mejorada para satisfacer todas las necesidades de los clientes. Los clientes que necesiten un motor gimbal pueden elegirlo según sus requerimientos.
Versión Estándar: sin placa de controlador, controlado por PWM
Versión Mejorada: con controlador y codificador magnético, controlado por CAN
El motor gimbal Innerunning G60 integra el codificador y el controlador en un solo módulo, utilizando un codificador absoluto para un control preciso, con una precisión de hasta 0,01°. Al mismo tiempo, soporta modos de control por lazo de velocidad y posición, logrando un control preciso y mejorando la velocidad de respuesta del feedback.
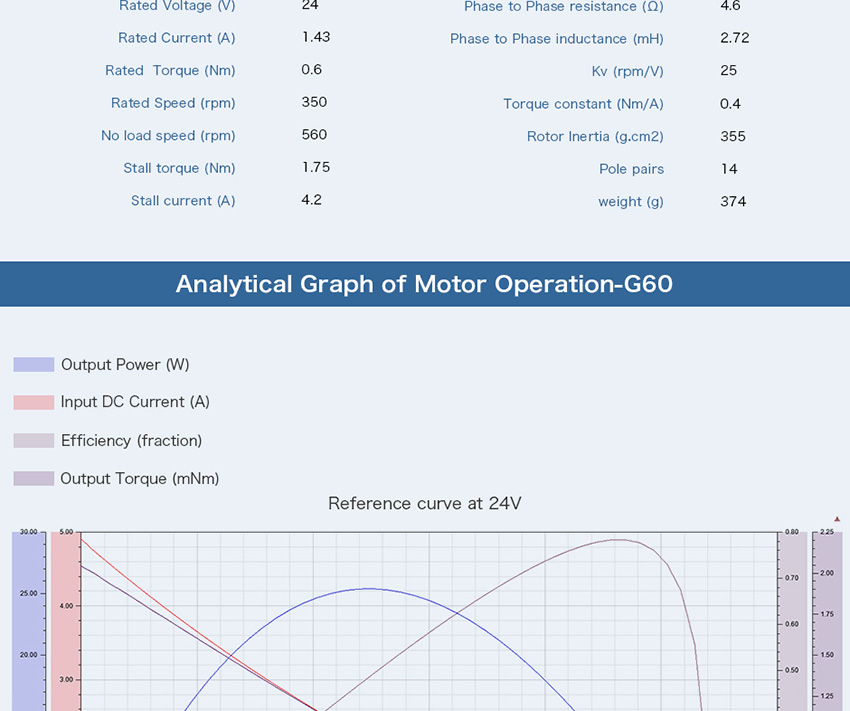
El G60 utiliza devanado de alto rendimiento, operación a baja velocidad y alta densidad de par para satisfacer las necesidades de gran potencia. Actualmente, sus principales campos de aplicación son otros usos de alta precisión y baja velocidad, como sistemas gimbal y plataformas autónomas.