创建您的CubeMars账号

我们常说,衡量一台四足机器人性能的,不仅仅只是它的步态,更是它面对复杂地形时的适应能力。
最近,年仅15岁的工程少年 Arsenii Mironov 给我们带来了一场令人印象深刻的测试。他将自己设计制造的四足机器人放置在一块可活动的木板上,通过抬起一边木板,让机器人从水平地面过渡到不断倾斜的坡面。整个过程中,机器人始终保持站立姿态,不滑动、不跌倒、不慌乱,稳如磐石。
这场测试的背后,它不仅考验控制算法在实时姿态调整上的鲁棒性,也对机器人执行器提出了极高要求——力矩响应要快,位置调整要准,输出变化要线性可控。正是在这样的测试中,电机的性能上限就被真正拉开了。Arsenii 选择了我们 CubeMars 的 AK70-10 KV100 机器人动力模组,作为机器人全部12个关节的动力来源。
这是一款集成驱控的高性能模组电机,具备:高扭矩密度:峰值扭矩达 24.8 Nm,应对复杂动态变化毫不吃力;
快速响应:极低的控制延迟,适合需要高频微调的控制策略;
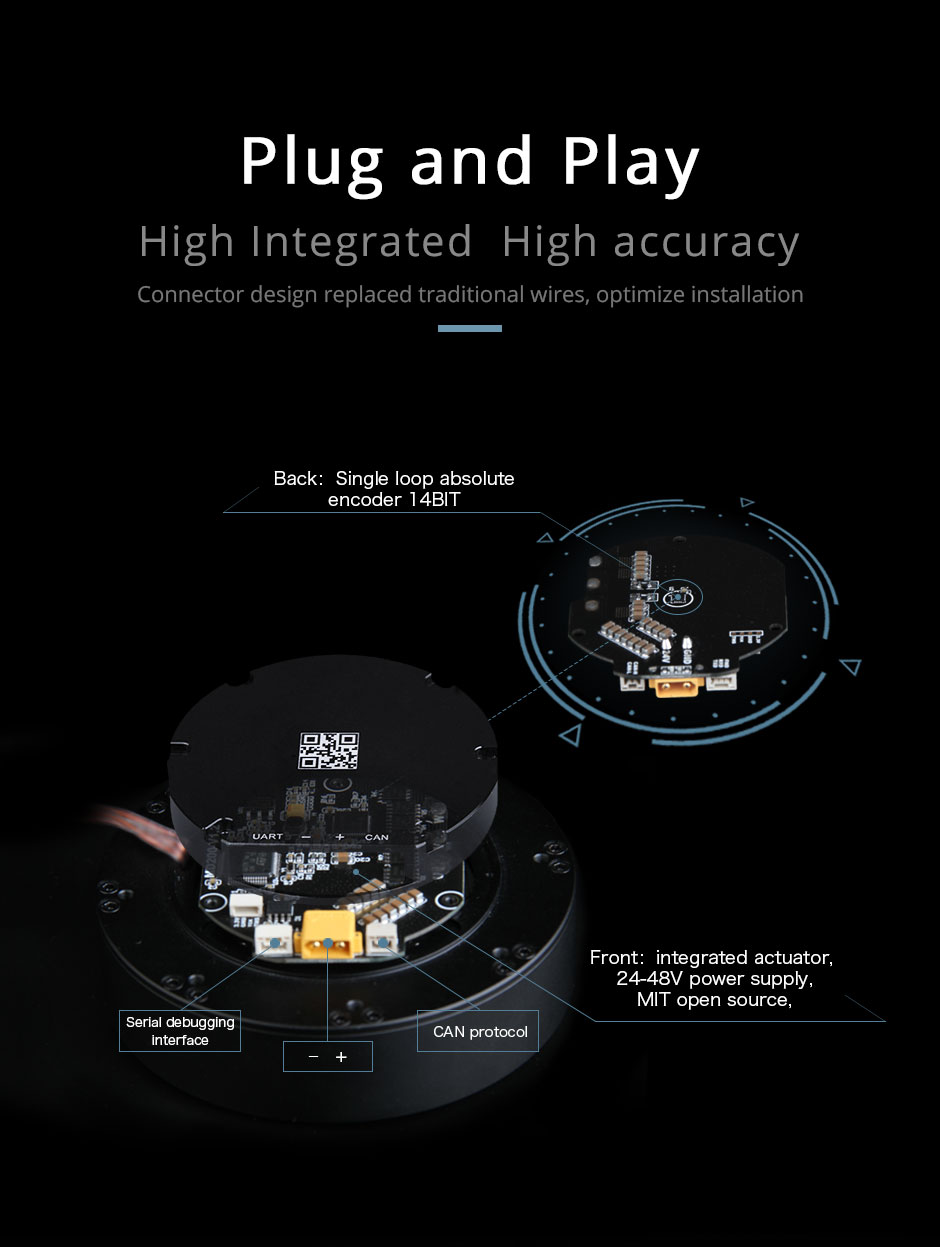
精准反馈:内置14位编码器,位置控制精度达到亚毫米级;
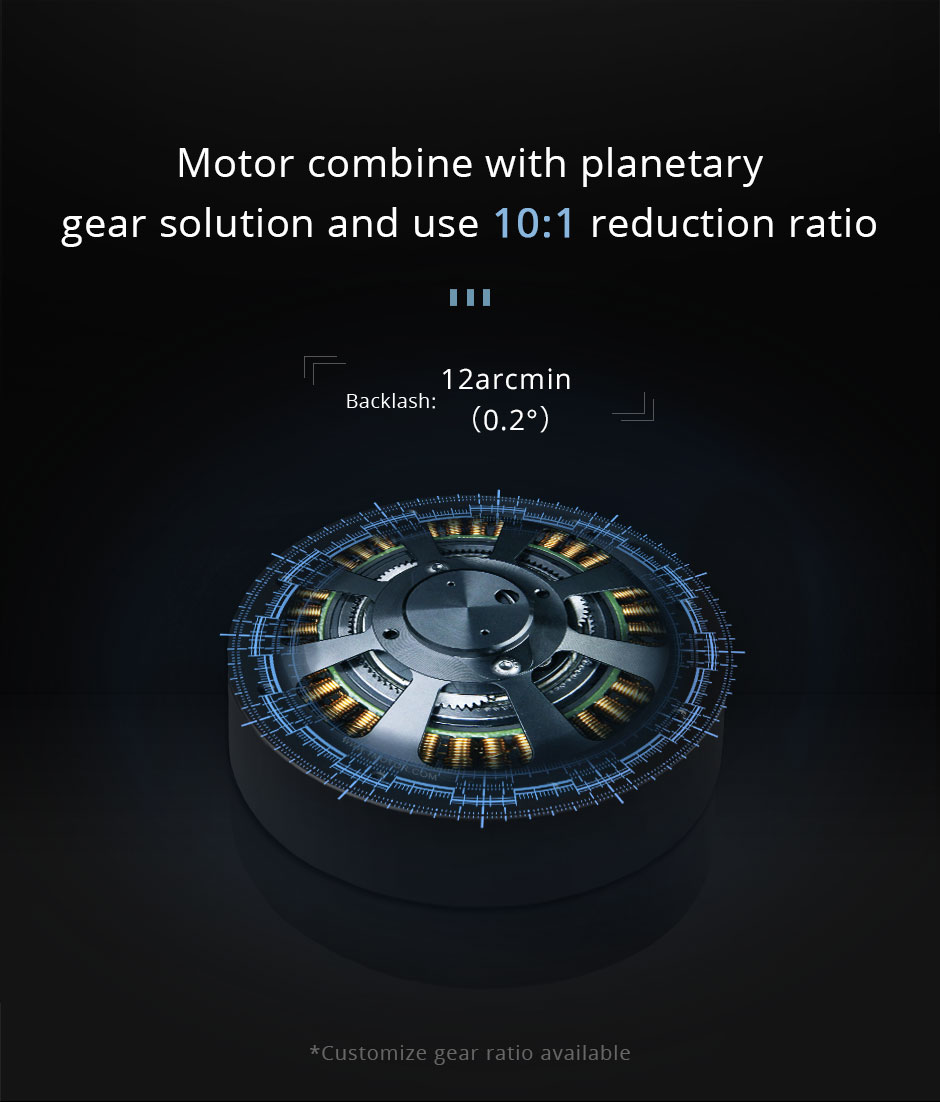
高集成度:内置电机、行星减速器和驱动一体,应对紧凑的空间布局。
这些性能,在这场“斜面挑战”中被充分释放。每当重心轻微偏移,AK70-10 KV100 的迅速调整就像机器肌肉的反射一样,将机器人重新拉回稳定区间。控制器和执行器之间的闭环协作,正是这场平衡奇迹的关键。我们为 Arsenii 感到骄傲。
也为 CubeMars 的电机在少年工程师手中发挥出这样的能力而自豪。我们将继续为这群不断挑战技术边界的创造者,提供更可靠、更敏捷的核心动力。

.png)



