














Новый пример для подражания
полностью обновлённаясерия RO
Низкий момент сопротивления
50

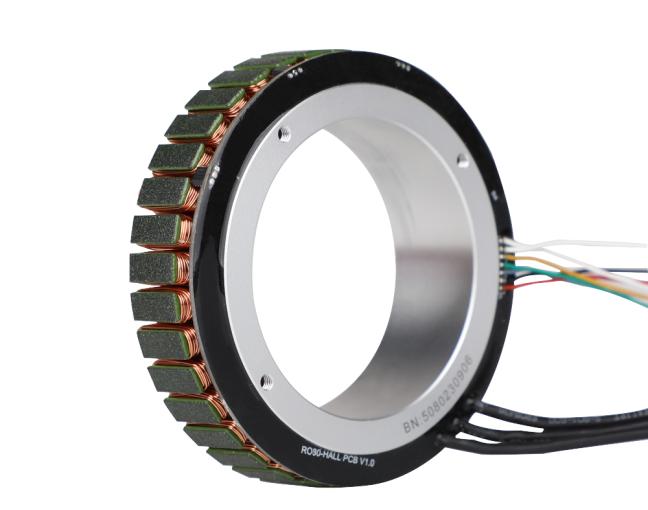
Большая полая конструкция


CubeMars RO80‑KV105 Standard — это высокопроизводительный бес корпусный тормозной двигатель внешнего ротора серии RO, разработанный как прецизионное приводное решение для робототехнических сочленений, экзоскелетов и других требовательных электромеханических систем.
Работает от напряжения 48 В, оснащен сверхнизким пульсационным моментом и большим диаметром полого вала, что облегчает прокладку проводов или прямую интеграцию с приводными валами и редукторами. В стандартной комплектации включает датчики Холла и температурный датчик, обеспечивающие точный обратный сигнал положения ротора и реальное время мониторинга температуры для повышения точности регулировки и безопасности системы.
С непрерывным крутящим моментом 1,3 Н·м, пиковым моментом до 4 Н·м и общим весом всего 352 г, RO80‑KV105 оптимизирован для приложений с ограниченным пространством, где критически важны высокая отзывчивость, плавное движение и исключительная надежность: экзоскелеты, кооперативные робототехнические руки, медицинская и аэрокосмическая робототехника и другие области.
Размеры двигателя: Φ92,6 × 26,4 мм
Вес: 352 г
Пиковый крутящий момент: 4 Н·м
холостой ход: 5040 об/мин
Сверхнизкий пульсационный момент: пульсационный момент снижен на ~50% по сравнению с традиционными двигателями, обеспечивая исключительно плавную работу на низких скоростях и при запуске
Конструкция с большим полым отверстием: обширное центральное отверстие позволяет проводить сигнальные/питательные кабели или напрямую соединять с выходными валами и гармоническими передачами, значительно улучшая гибкость механической интеграции
Интегрированные датчики Холла + температуры: обеспечивают точную коммутацию и реальное время тепловой защиты, повышая общую надежность системы и безопасность эксплуатации
Корпус из алюминиевого сплава + компактные габариты: легкий, но прочный алюминиевый корпус обеспечивает отличную коррозионную стойкость и ударостойкость; общий вес ~352 г делает его идеальным для установки в ограниченном пространстве
Широкая совместимость приложений: подходит для роботов-экзоскелетов, кооперативных манипуляторов, медицинской/аэрокосмической робототехники, четвероногих платформ и систем вращения колес АГВ
Бес корпусный тормозной двигатель внешнего ротора RO80‑KV105 Standard с датчиками Холла ×1
Сертификат соответствия ×1
| RO80 KV105 Стандартная версия |
 |
| RO80 KV105 Lite версия |
 |
| RO80 KV105 Стандартная версия | |||
| Применение | Кооперативныйроботизирова нныйрука | Классизоляции | F |
| Типпривода | FOC | Напряжение пробояизоляции | 500V |
| Рабочаятемпература окружающейсреды | -20℃~50℃ | Сопротивление изоляции | 10мΩ |
| Схемасоединенияобмоток | delta | Крутящиймомент альгина | 24N.мм |
| Парыполюсов | 21 | Инерция | 2612гcm² |
| Максимальноеотношение моментаквесу | 11.36Нм/кг | Вес | 352г |
| Весротора | 148г | Массастатора | 204г |
| СенсорнаялинияHolewyn | 30#силиконоваяпроволока AW100±5ммжестяная 5±2мм | Выходнойпровод | Трехфазныйпроводдвигателя: эмалированныйпроводпрямой 100±5ммпожести5±2мм |
| Диаметртрехфазнойпроволоки | 3.5мм | ||
| RO80 KV105 Lite версия | |||
| Применение | Кооперативныйроботизирова нныйрука | Классизоляции | F |
| Типпривода | FOC | Напряжение пробояизоляции | 500V |
| Рабочаятемпература окружающейсреды | -20℃~50℃ | Сопротивление изоляции | 10мΩ |
| Схемасоединенияобмоток | delta | Крутящиймомент альгина | 24N.мм |
| Парыполюсов | 21 | Инерция | 1600гcm² |
| Весротора | 85г | Вес | 265г |
| Максимальнаявысотавыступа эмалированнойпроволоки составляет | 6мм | Массастатора | 180г |
| Диаметртрехфазнойпроволоки | 3.5мм | Выходнойпровод | Трехфазныйпроводдвигателя: эмалированныйпроводпрямой 100±5ммпожести5±2мм |
| Electric Parameters Электрические характеристики | |||
| Номинальноенапряжение | 48В | Ke | 9.07В/1000обм/мин |
| Скоростьвращения | 5040об/мин | Межфазное сопротивление | 120мΩ |
| Номинальныймомент | 1.3Нм | Межфазная индуктивность | 103μH |
| Номинальнаяскорость | 3600об/мин | Константамомента | 0.25Нм/√Вт |
| Номинальныйток | 15пост.ток,А | Механическая постояннаявремени | 2.95мс |
| Пиковыйкрутящиймомент | 4Нм | Электрическая постояннаявремени | 0.86мс |
| Пиковыйток | 50пост.ток,А | KT | 0.087Нм/А |
| KV | 105об/В | ||



