Регистрировать

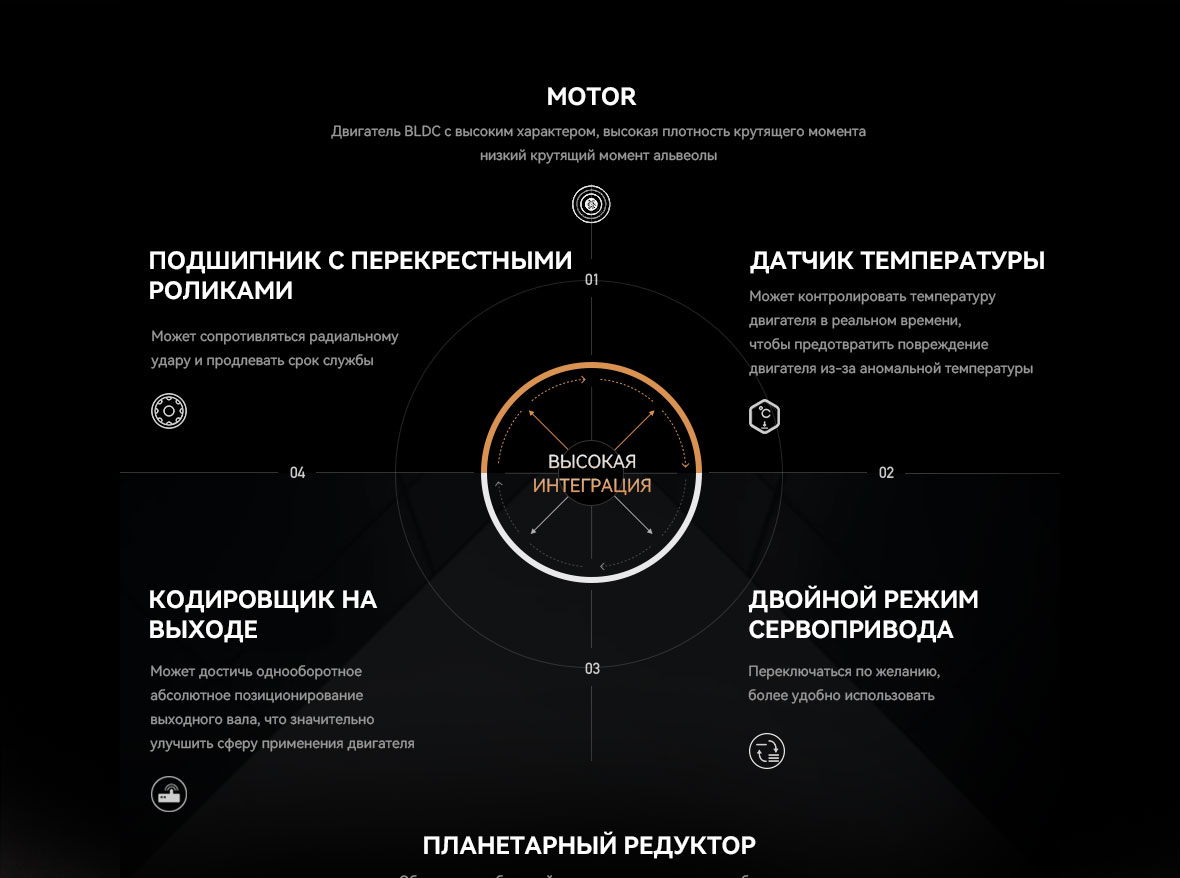
Роботический актуатор CubeMars AK10-9 V2.0 KV60 интегрирует бесщёточный двигатель постоянного тока, планетарную передачу собственной разработки и плату драйвера в компактное, легко устанавливаемое устройство. Благодаря планетарному редуктору с коэффициентом 9:1 он балансирует между скоростью отклика и характеристиками выходного момента. Модуль поддерживает два режима управления — сервопривод и управление усилием. Он оснащён разъемами для подключения и автоматической идентификацией параметров ПИД-регулятора. Встроена защита от перетоков, перепада напряжения и перегрева, обеспечивающая безопасную и надёжную работу в сложных средах.
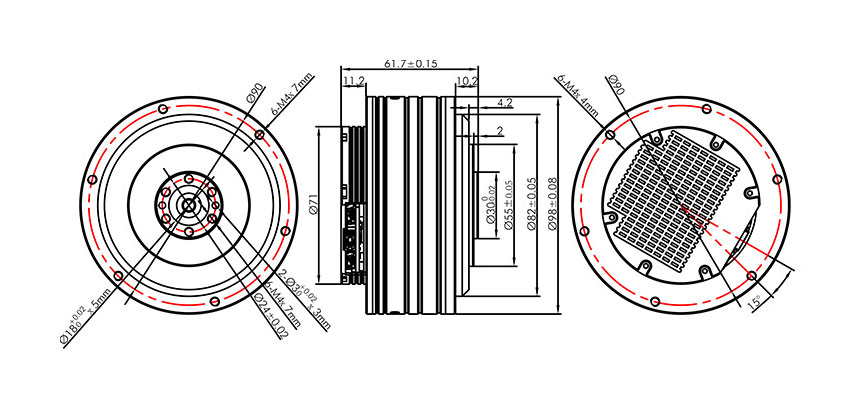
Размеры мотора: Ф98*61,7 мм
Вес мотора: 960 г
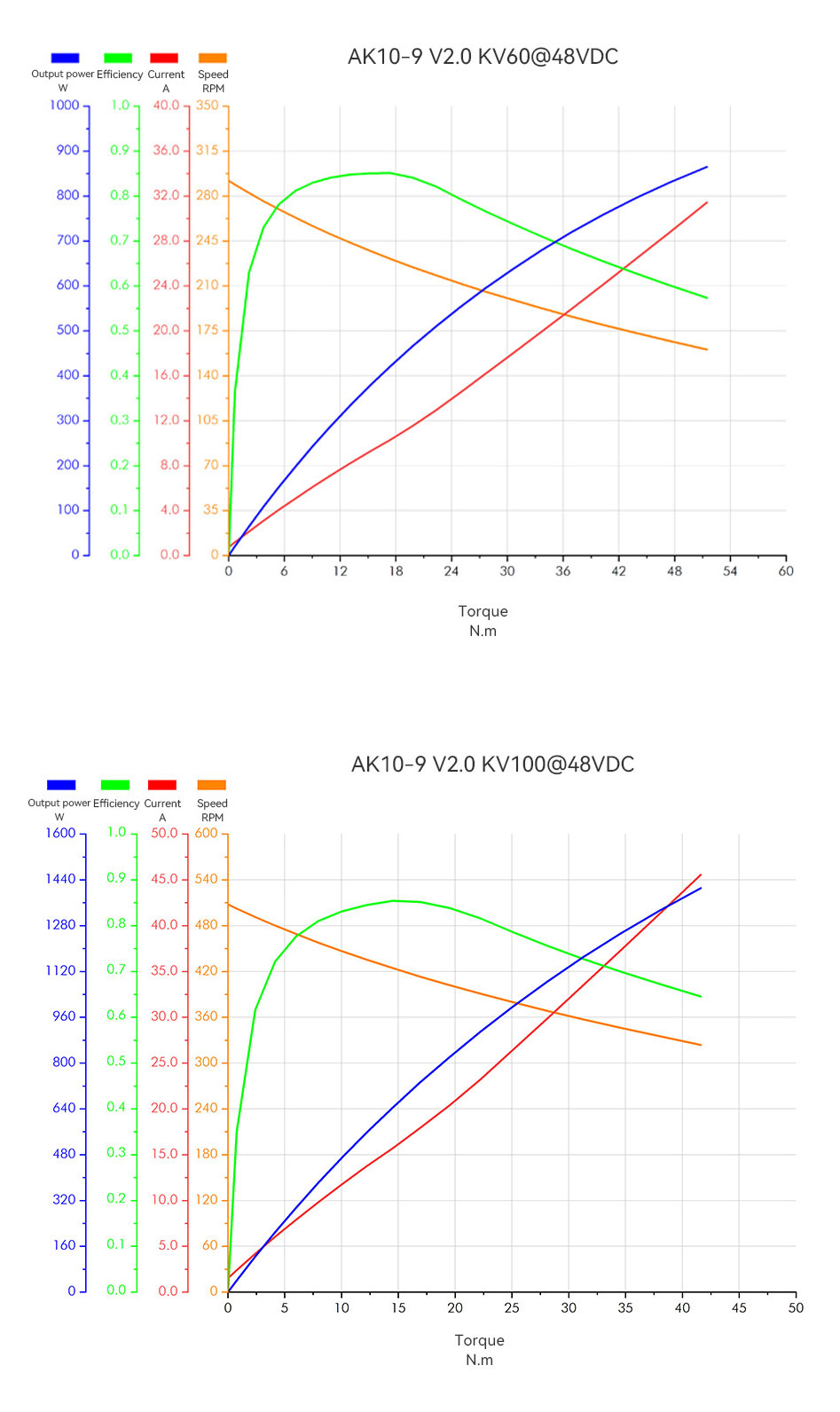
Пиковый момент: 48 Нм
Скорость холостого хода: 320 об/мин
Полностью интегрированный дизайн: мотор, редуктор, драйвер и энкодер объединены в единое устройство, значительно упрощая проводку и установку.
Отличная плотность момента: пиковый момент 48 Нм при весе 0,96 кг ⇒ максимальная плотность момента около 50 Нм/кг.
Поддержка двух режимов управления: сервопривод и управление усилием, что расширяет диапазон применений.
Возможность автокалибровки: модуль оснащён адаптивной идентификацией параметров ПИД-регулятора, сокращая время настройки.
Комплексная защита: встроенная защита от перетоков, перепада напряжения и перегрева повышает надёжность.
Конструкция с разъемами для подключения: упрощает соединение модулей с внешними контроллерами, повышая эффективность сборки.
Широкий диапазон применений: рекомендуется для ножных роботов, экзоскелетных систем, АГВ и шарнирных модулей.
Актуатор AK10-9 V2.0 KV60 (Стандартная комплектация включает Driver Board)x1
П power Cable x1
Провода CAN x1
Сертификат соответствия x1
R-link V2.0
Набор проводов V2.0

| Применение | Роботизированные ноги, Экзоскелет, AGV | Пиковый крутящий момент (Нм) | 48 |
| Тип привода | FOC | Пиковый ток (пост. ток, А | 29.8 |
| Рабочая температура окружающей среды | -20℃~50℃ | KV (об/В) | 60 |
| Схема соединения обмоток | Star | KT (Нм/А) | 0.198 |
| Класс изоляции | C | Ke (В/1000 обм/мин) | 17.2 |
| Напряжение пробоя изоляции | 1000V 5mA/2s | Межфазное сопротивление (мΩ) | 195 |
| Сопротивление изоляции | 1000V 10MΩ | Межфазная индуктивность (μH) | 181 |
| Фаза | 3 | Инерция (гсм²) | 1002 |
| Пары полюсов | 21 | Константа момента (Нм/√Вт) | 0.45 |
| Коэффициент понижения редуктора | 9:1 | Механическая постоянная времени (мс) | 0.5 |
| Момент обратного хода (Нм) | 0.8 | Электрическая постоянная времени (мс) | 0.93 |
| Люфт (°) | 0.33 | Вес (г) | 960 |
| Датчик температуры | NTC MF51B 103F3950 | Максимальное отношение момента к весу (Нм/кг) | 50 |
| Шум в дБ на расстоянии 65 см от мотора | 65 | Порт CAN | A1257WR-S-4P |
| Макс. осевая нагрузка (динамическая) Н | 2000 | Порт UART | A1257WR-S-3P |
| Макс. осевая нагрузка (статическая) Н | 2520 | Порт питания | XT30PW-M |
| Номинальное напряжение (В) | 24/48 | Тип энкодера внутренней петли | Magnetischer impuls |
| Номинальный момент (Нм) | 18 | Разрешение энкодера внутренней петли | 14bit |
| Номинальная скорость (об/мин) | 109/228 | Тип энкодера внешней петли | Magnetischer impuls |
| Номинальный ток (пост. ток, А) | 10.6 | Разрешение энкодера внешней петли | 15bit |
| Количество энкодеров | 2 |