Créer votre compte CubeMars

Dans le domaine de l’interaction homme-robot, la technologie des exosquelettes s’est imposée comme une solution clé pour la rééducation, l’assistance à la locomotion et l’augmentation des capacités physiques. Cependant, parvenir à une interaction homme–exosquelette efficace et précise demeure un défi majeur, en particulier en matière d’estimation et de contrôle des forces. Les méthodes traditionnelles reposent sur des capteurs de force pour mesurer les forces d’interaction, ce qui accroît la complexité et le coût du système. Cette étude présente une méthode d’estimation de la force basée sur la technologie à entraînement quasi-direct (QDD), permettant d’estimer les forces d’interaction sans recourir à des capteurs de force supplémentaires, en exploitant la dynamique intrinsèque de l’actionneur.
 Technology")
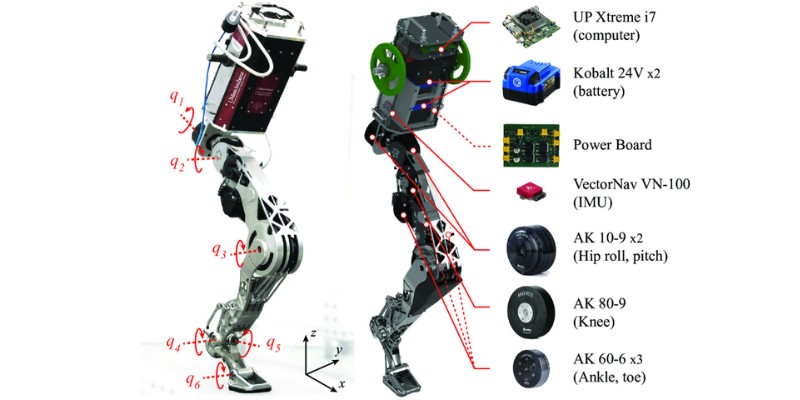
L’équipe de recherche a développé un exosquelette de hanche utilisant la technologie QDD afin de fournir un couple d’assistance tout en minimisant les contraintes sur le mouvement naturel de l’homme. Le cœur de la conception du système réside dans l’utilisation d’un actionneur à faible rapport de réduction pour l’entraînement direct des articulations, améliorant la rétroaction mécanique et le confort de l’utilisateur. Cette étude utilise le CubeMars AK10-9 V1.1 actionneur robotique, qui présente une densité de couple élevée et une faible impédance mécanique, le rendant parfaitement adapté aux systèmes basés sur la technologie QDD.
Pour réaliser l’estimation des forces d’interaction sans capteur, les chercheurs ont établi un modèle dynamique complet de l’actionneur, intégrant des facteurs tels que l’inertie de rotation, les couples de friction et les caractéristiques de transmission des engrenages. Ce modèle permet l’estimation en temps réel du couple à partir des mesures de courant et de vitesse angulaire, dérivant finalement les forces d’interaction entre l’exosquelette et l’utilisateur.
L’équipe de recherche a développé une plateforme de test afin de caractériser d’abord les performances de l’actionneur dans des conditions contrôlées, puis de valider le système lors d’une expérience de marche. L’essai a consisté en un sujet marchant sur un tapis roulant tout en portant l’exosquelette de hanche, avec différents niveaux de couple d’assistance (6 Nm, 8 Nm et 10 Nm).
Les résultats ont montré que la méthode d’estimation de force proposée a atteint une erreur absolue moyenne (MAE) de seulement 2,78 ± 0,58 N, soit 6,4 % de la force nominale. Comparée aux méthodes conventionnelles basées sur des capteurs de force, cette approche a maintenu une grande précision tout en réduisant la dépendance au matériel, améliorant ainsi l’efficacité et la fiabilité du système. De plus, la méthode de contrôle de couple en boucle ouverte basée sur le modèle a amélioré la précision du suivi, réduisant l’erreur de 23 % par rapport aux méthodes de contrôle nominales.
Les principales contributions de cette étude incluent :
1、Réduction de la dépendance aux capteurs de force, diminuant ainsi la complexité et le coût du système tout en améliorant la praticité de l’exosquelette.
2、Amélioration des stratégies de contrôle du couple, conduisant à une assistance à la marche plus stable et à un meilleur confort de marche pour l’utilisateur.
3、Amélioration de la rétroaction mécanique du système, permettant à l’exosquelette de s’adapter naturellement aux mouvements humains sans entraver la démarche normale.
Cette technologie offre de nouvelles perspectives pour le développement futur des systèmes d’exosquelettes, notamment dans des applications telles que la rééducation, l’assistance industrielle et le soutien à la mobilité des personnes âgées. Les recherches futures pourraient affiner davantage l’optimisation des paramètres personnalisés pour améliorer la précision de l’estimation des forces d’interaction et s’adapter à un plus large éventail d’utilisateurs.