Crear su cuenta de CubeMars

Los robots bípedos han despertado un gran interés en la tecnología robótica actual debido a su capacidad para desplazarse con agilidad en entornos complejos. A medida que continúan los avances tecnológicos, los investigadores se dedican a desarrollar robots bípedos que puedan sincronizarse de manera eficiente con los operadores humanos, especialmente en aplicaciones relacionadas con emergencias causadas por desastres naturales o riesgos de origen humano.
A pesar de los avances significativos en inteligencia artificial, los robots bípedos existentes aún tienen dificultades para igualar las capacidades humanas en control del movimiento y flexibilidad. Para mejorar el rendimiento de los robots en entornos complejos e inciertos, un equipo de investigación propuso un sistema de teleoperación basado en retroalimentación bilateral. Este sistema tiene como objetivo transferir en tiempo real la inteligencia motora del operador humano al robot, permitiéndole imitar la marcha, los saltos y otras acciones dinámicas del operador.
En este proyecto, los investigadores adoptaron un enfoque de teleoperación de cuerpo completo, que permite a los operadores interactuar con el robot mediante dispositivos portables. Los movimientos del operador son capturados por sensores y convertidos en comandos comprensibles para el robot. Para garantizar que el robot pueda ejecutar tareas de manera eficiente, el equipo de investigación diseñó un mecanismo de retroalimentación bilateral compuesto por dos componentes principales:
Los datos de movimiento del operador se escalan en tiempo real para ajustarse a las proporciones requeridas por el robot, asegurando que el robot pueda responder adecuadamente a las acciones del operador.
Mientras el robot ejecuta los movimientos, se proporcionan fuerzas de retroalimentación que ayudan al operador a percibir el nivel de sincronización entre el robot y sus propios movimientos. Esto permite al operador ajustar sus acciones según la velocidad y el estado del robot, facilitando una colaboración más fluida.
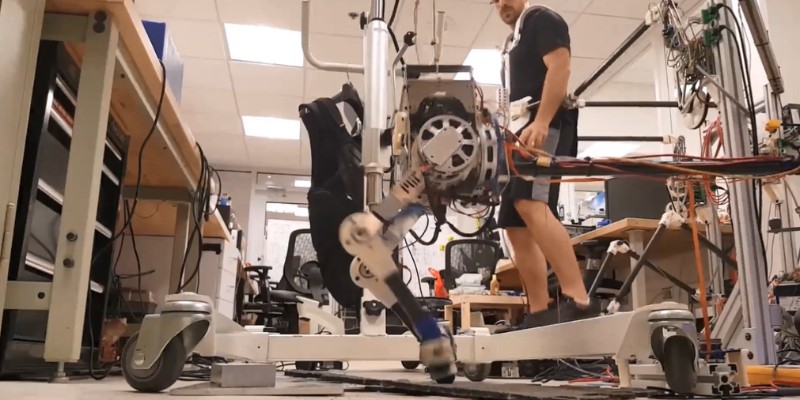
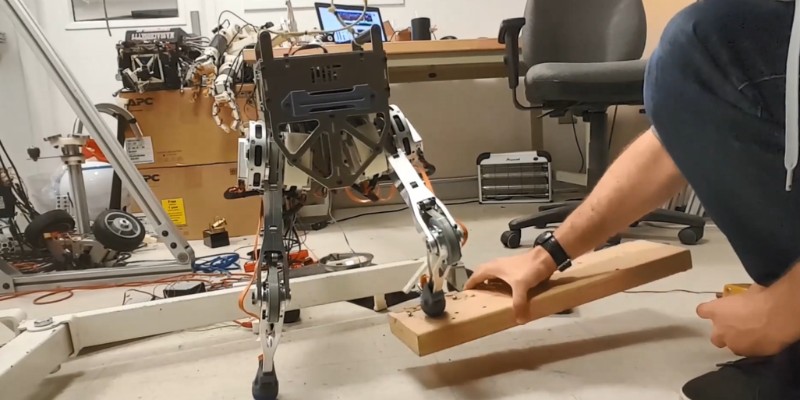
Durante la fase experimental, el robot ejecutó con éxito diversas acciones dinámicas, incluyendo caminar, marchar en el lugar y realizar saltos consecutivos. El equipo de investigación también demostró que el robot, bajo el control del operador, podía mantener el equilibrio dinámico y adaptarse a perturbaciones externas. Estos experimentos no solo validaron la eficacia del mecanismo de retroalimentación bilateral, sino que también proporcionaron un respaldo crucial para la estabilidad del robot en aplicaciones del mundo real.
Esta investigación destaca el potencial de combinar la inteligencia motora humana con el control robótico, ofreciendo nuevas perspectivas para mejorar las capacidades de los robots bípedos en aplicaciones prácticas. Al aprovechar este enfoque, los robots pueden adaptarse mejor a entornos complejos, especialmente en situaciones de emergencia, proporcionando un apoyo eficaz a los equipos de respuesta y rescate.
De cara al futuro, el equipo de investigación planea optimizar aún más los algoritmos de control para mejorar la flexibilidad y la velocidad de respuesta del robot, permitiéndole afrontar tareas más complejas. Este proyecto no solo impulsa el desarrollo de la tecnología de robots bípedos, sino que también sienta las bases para una colaboración más estrecha entre humanos y robots.


