Registrieren

Bei der Bewertung eines Roboterhundes (Quadruped-Roboters) ist das Gangmuster nur ein Teil der Geschichte. Die eigentliche Herausforderung liegt in der Fähigkeit, sich an unebenes Gelände anzupassen und die dynamische Stabilität in Echtzeit aufrechtzuerhalten.
Kürzlich baute der 15-jährige Technikbegeisterte Arsenii Mironov seinen eigenen Roboterhund und führte einen bemerkenswerten Balancetest durch. Er stellte den Roboter auf ein kippbares Holzbrett und hob eine Seite langsam an, um eine Schräge zu erzeugen. Trotz der sich verändernden Neigung behielt der Roboter einen stabilen Stand – kein Rutschen, kein Umkippen, einfach solide Stabilität.
Dieser Test war nicht nur eine Prüfung der Hardware – er war ein Stresstest für die Steuerungsalgorithmen und die Roboteraktuatoren. Jede noch so kleine Bewegung erforderte:
Schnelle Drehmomentreaktion
Präzise Positionsanpassung
Sanfte, kontrollierbare Ausgabe
Ohne diese Eigenschaften könnten selbst die besten Steuerungsstrategien den Roboter nicht im Gleichgewicht halten.
Warum Arsenii sich für den CubeMars AK70-10 KV100 entschied
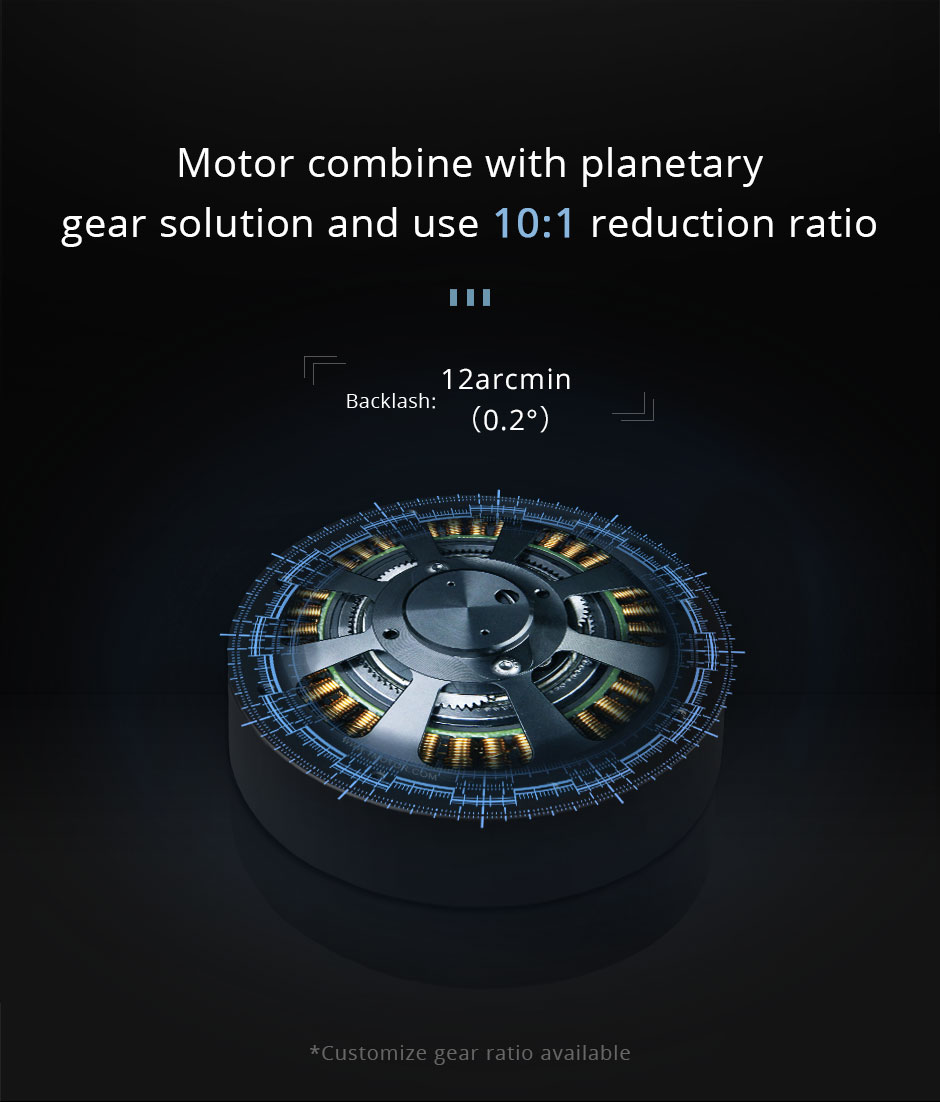
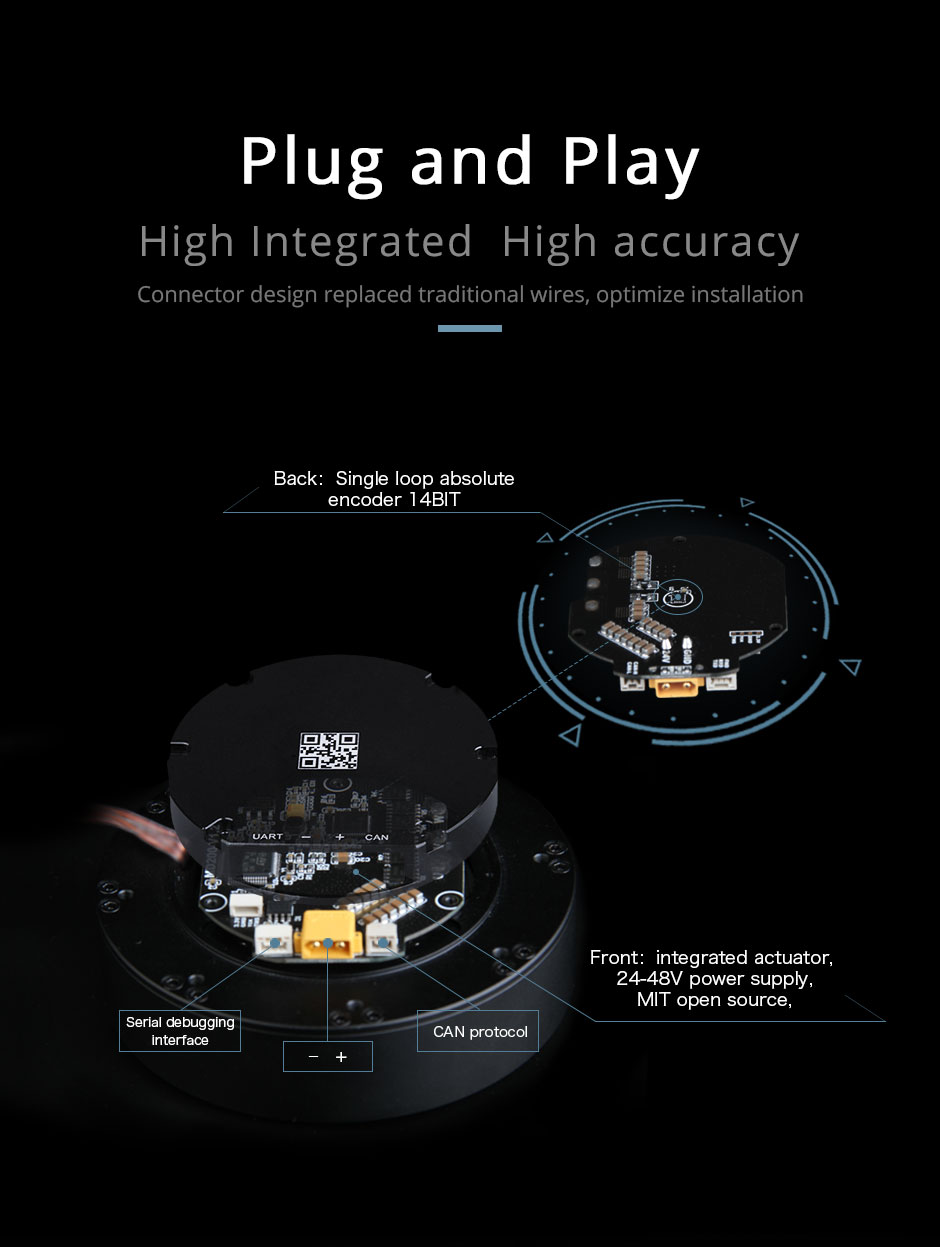
Um die 12 Gelenke seines Roboterhundes anzutreiben, wählte Arsenii den CubeMars AK70-10 KV100 Roboteraktuator – 24/48V, 10:1 Übersetzungsverhältnis, bekannt für seine Leistung in anspruchsvollen Anwendungen:
Hohe Drehmomentdichte: Spitzendrehmoment von 24,8 Nm für dynamische Lasten
Ultraschnelle Reaktion: Geringe Latenz für präzise, hochfrequente Anpassungen
Präzises Feedback: Integrierter 14-Bit-Encoder mit Submillimeter-Genauigkeit
Kompakte Integration: Motor, Planetengetriebe und Treiber in einem für enge Bauräume
Im Kipp-Test agierte der AK70-10 KV100 Roboteraktuator wie die Muskeln eines Tieres mit Reflexreaktionen. Wenn das Gleichgewicht des Roboters leicht gestört wurde, passten die Motoren des Roboterhundes sich sofort an und brachten ihn zurück in eine stabile Position. Diese geschlossene Rückkopplung zwischen Steuerung und Aktuator ist der Schlüssel zur Beherrschung dynamischer Gelände.
Bei CubeMars sind wir stolz darauf, junge Innovatoren wie Arsenii Mironov zu sehen, die die Möglichkeiten der Robotik erweitern. Wir setzen uns dafür ein, Hochleistungsaktuatoren für Roboterhunde, Quadrupeds und mehr bereitzustellen – und so die nächste Generation von Entwicklern zu unterstützen.


