Registrieren

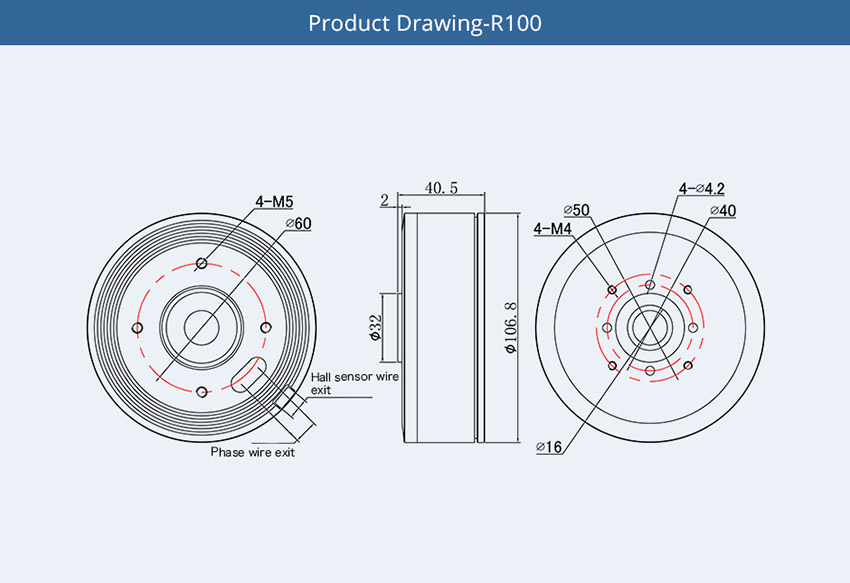
Der externe Drehmomentmotor R100 der Serie R ist mit einem eingebauten Hall-Sensor ausgestattet, der elektrische Winkel beträgt 120±20°C. Das spezielle Wärmeableitungsdesign des R100 mit einer ultradünnen Statorabdeckung und einer Silikonunterlage mit hohem Wärmeleitfähigkeitsverhältnis reduziert die Gesamthöhe der Montage und ermöglicht gleichzeitig die Wärmeableitung des Maschinenkörpers für einen sorgenfreien Betrieb.
Für den Einbau des Getriebes sind Befestigungslöcher in der Rotorendkappe vorgesehen, so dass die Kunden direkt das entsprechende Harmonic-Getriebe montieren oder andere Getriebetypen anflanschen können, um den Bedarf an höherem Drehmoment zu decken.
Der R100 ist mit einem Steckdosenstecker ausgestattet, der die herkömmlichen redundanten Kabel überflüssig macht und die Installation optimiert, so dass sie einfach und bequem zu vereinfachen ist.
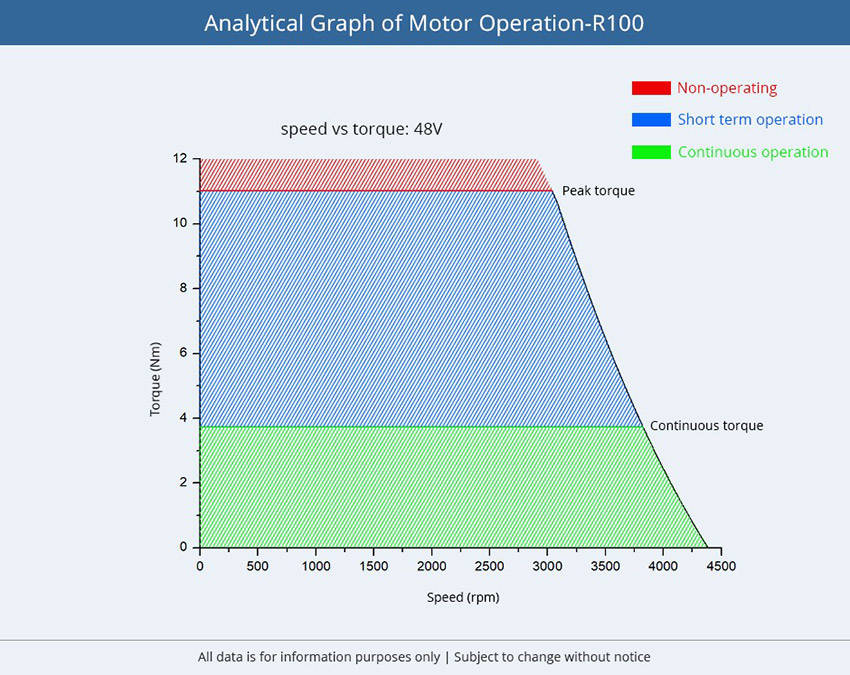
Außenrotationsmotor R100 mit geringem Rastmoment und geringer Trägheit. Reibungsloser Lauf, ob beim Gehen, Hüpfen, Laufen oder in verschiedenen Haltungen!
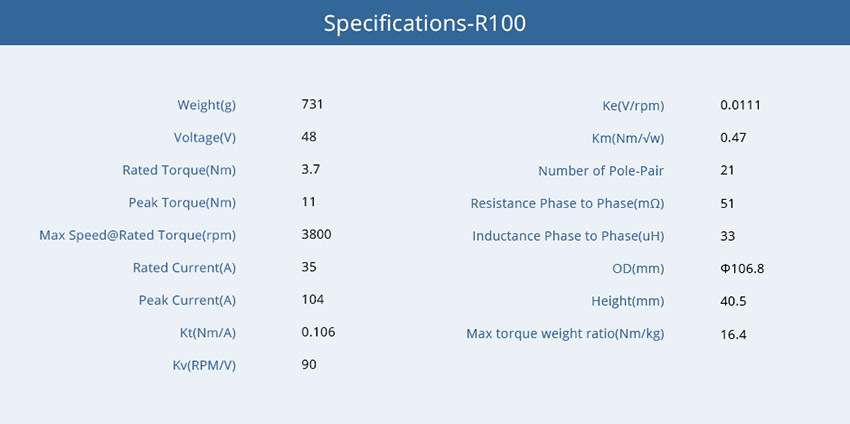
Der R100 ist robust und leistungsstark und wurde für Roboter mit großen Lasten, mehr Drehmoment (2,3-11 Nm) und mehr Stabilität entwickelt.