Neue Gesichter der neuen
RO-KOLLEKTION
GERINGES RASTMOMENT
50

GROSSE HOHLRAUM DESIGN












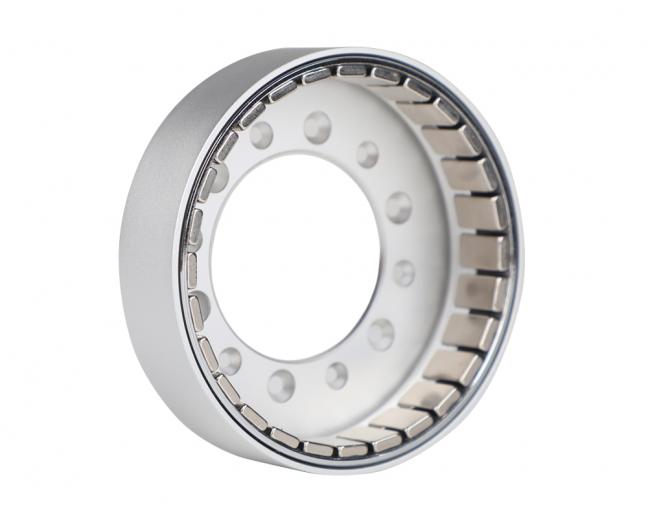





Der CubeMars RO60 KV115 ist ein neu eingeführter rahmenloser Außenläufer-Torquemotor der RO-Serie mit standardmäßig eingebauten Hall-Sensoren. Er wurde speziell für Hochleistungsanwendungen wie Roboterachsen, Exoskelette, kollaborative Roboterarme, medizinische Geräte und aerospace-Systeme entwickelt.
Beim Nennspannung von 48 V verfügt dieser Motor über ein ultrahohes coggingfreies Drehmomentdesign und eine großdurchmessige Hohlwelle, die einen flexiblen Wellenwechsel und vielseitige Montagekonfigurationen ermöglicht (z. B. direkte Integration in Getriebe, Kabelverlegung durch die Mitte oder Durchführung der Antriebswelle). Integrierte Hall- und Temperatursensoren liefern präzise Rotorpositionsrückmeldung und Echtzeit-Thermomonitoring für verbesserte Steuergenauigkeit und Systemssicherheit.
Mit einem Dauerbetriebsdrehmoment von 0,8 N·m (Spitzendrehmoment bis zu 2,4 N·m) und einem Gesamtgewicht von nur 248 g bietet der RO60-KV115 eine ausgezeichnete Reaktionsfähigkeit und Stabilität in raumbeschränkten Robotersystemen.
Motordimensionen: Φ73,8 × 23 mm
Gewicht: 248 g
Spitzendrehmoment: 2,4 N·m
Leerlaufdrehzahl: 5520 rpm
Ultrahohes coggingfreies Drehmoment: Cogging-Torque um ~50 % reduziert im Vergleich zu Motoren der gleichen Klasse, gewährleistet sanfte Niedriggeschwindigkeitsbetätigung und verbesserte Bewegungssteuerungsgenauigkeit
Großes Hohlwellendesign: Bietet ausreichend zentrale Durchgangslöcher für Kabelverlegung, Integration von Antriebswellen oder direkte Kopplung mit Harmonischen Getrieben und anderen Übertragungskomponenten
Integrierte Hall + Temperatursensoren: Ermöglichen genaue Kommutierung und Echtzeit-Thermschutz, steigern die Systemzuverlässigkeit und -sicherheit
Kompakt und leicht: Mit nur ~248 g Gewicht ideal für Hochleistungsroboterachsen und Anwendungen mit strengen Raum- und Gewichtsbeschränkungen
Breite Anwendungskompatibilität: Geeignet für Exoskelette, kollaborative Arme, medizinische Roboter, vierbeinige Roboter, Inspektions-AGVs und mehr
CubeMars RO60 KV115 Standard-mit-Hall-rahmenloser Außenläufer-Torquemotor ×1
Konformitätszertifikat ×1
| RO60 KV115 Standard version |
 |
| RO60 KV115 Lite-Version |
 |
| RO60 KV115 Standard version | |||
| Anwendungsbereiche | MechanischerkollaborativerArm | Isolationsklasse | F |
| Betriebsart | FOC | Stehende Isolationsspannung | 500V |
| Betriebsumgebungstemperatur | -20℃~50℃ | Isolationswiderstand | 10MΩ |
| AnschlussderSpule | star | GeringesRastmoment | 15N.mm |
| AnzahlderPolpaare | 14 | Trägheit | 1161gcm² |
| MaximaleDrehmomentdichte | 9.68Nm/kg | Gewicht | 248g |
| GewichtdesRotors | 105g | GewichtdesStators | 143g |
| HolewynSensorlinie | 30#AWSilikondraht100±5mm Zinn5±2mm | Auslass-Draht | Motor-Drehstromdraht:Lackdraht gerade100±5mmüberZinn 5±2mm |
| Durchmesserdesdreiphasigen Drahtes | 3mm | ||
| RO60 KV115 Lite-Version | |||
| Anwendungsbereiche | MechanischerkollaborativerArm | Isolationsklasse | F |
| Betriebsart | FOC | Stehende Isolationsspannung | 500V |
| Betriebsumgebungstemperatur | -20℃~50℃ | Isolationswiderstand | 10MΩ |
| AnschlussderSpule | star | GeringesRastmoment | 15N.mm |
| AnzahlderPolpaare | 14 | Trägheit | 800gcm² |
| GewichtdesRotors | 70g | Gewicht | 195g |
| DiemaximaleHöhedes Lackdrahtüberstandesbeträgt | 5mm | GewichtdesStators | 125g |
| Durchmesserdes dreiphasigenDrahtes | 3mm | Auslass-Draht | Motor-Drehstromdraht:Lackdraht gerade100±5mmüberZinn 5±2mm |
| Elektrische Parameter | |||
| Nennspannung | 48V | Konstanteder inversenEMK | 8.28V/krpm |
| Nenndrehzahl | 5520rpm | Leitungswiderstand | 300mΩ |
| Nenndrehmoment | 0.8Nm | Leitungsinduktivität | 395μH |
| Nenndrehzahl | 4200rpm | Motorkonstante | 0.17Nm/√W |
| Nennstrom | 8.5ADC | Elektromechanische Zeitkonstante | 2.86ms |
| Spitzendrehmoment | 2.4Nm | ElektrischeZeitkonstante | 1.32ms |
| Spitzenstrom | 40ADC | Drehmomentkonstante | 0.094Nm/A |
| Drehzahlkonstant | 115rpm/V | ||

| Kategorie | Modell | Nennspannung (V) | Nennleistung (W) | Nenndrehmoment (Nm) | Nennstrom (A) | Nenndrehzahl (RPM) | Spitzendrehmoment (Nm) | Spitzenstrom (A) | Leerlaufdrehzahl (RPM) | Widerstand des Drahtes (mΩ) | Draht-Induktivität (μH) | Anzahl der Polpaare | Gewicht (G) | Größe (Durchmesser × Länge) MM | Hall-Sensor | Temperatursensor | Operation |
| RO Serie | RO100 KV55-Standardausführung-serienmäßig-mit-Hall | 48 | 838 | 4 | 20 | 2000 | 12 | 62 | 2550 | 143 | 137 | 21 | 710 | Ф113.5*36.2 | Yes | Yes |  |
| RO Serie | RO100 KV55 Lite-Version ohne Hall | 48 | 838 | 4 | 20 | 2000 | 12 | 62 | 2550 | 143 | 137 | 21 | 525 | Ф108.3*28 | No | No | |
| RO Serie | RO80 KV105-Standardausführung-serienmäßig-mit-Hall | 48 | 490 | 1.3 | 15 | 3600 | 4 | 50 | 5040 | 120 | 103 | 21 | 352 | Ф92.6*26.4 | Yes | Yes | |
| RO Serie | RO80 KV105 Lite-Version ohne Hall | 48 | 490 | 1.3 | 15 | 3600 | 4 | 50 | 5040 | 120 | 103 | 21 | 265 | Ф88.6*17.7 | No | No | |
| RO Serie | RO60 KV115-Standardausführung-serienmäßig-mit-Hall | 48 | 352 | 0.8 | 8.5 | 4200 | 2.4 | 40 | 5520 | 300 | 395 | 14 | 248 | Ф73.8*23 | Yes | Yes | |
| RO Serie | RO60 KV115 Lite-Version ohne Hall | 48 | 352 | 0.8 | 8.5 | 4200 | 2.4 | 40 | 5520 | 300 | 395 | 14 | 195 | Ф70.5*15 | No | No | |
| RO Serie | RO40 KV140 Lite | 24 | 51 | 0.2 | 2.85 | 2450 | 0.6 | 11.6 | 3400 | 1700 | 580 | 14 | 60 | Ф46.3*13 | No | No | |
| RO Serie | RO50 KV108 Lite | 24 | 66 | 0.3 | 3.4 | 2100 | 0.9 | 0.9 | 2600 | 1035 | 460 | 14 | 105 | Ф41.7*14.5 | No | No | |



