Registrieren











Der CubeMars AK80-6 KV100 robotische Aktuator integriert einen leistungsstarken bürstenlosen Gleichstrommotor, ein 6:1-Planetengetriebe, einen Encoder und eine Treiberplatine in eine kompakte, einfach zu installierende Einheit. Er liefert eine stabile Drehmomentausgabe bei gleichzeitiger schneller dynamischer Reaktion. Das Modul unterstützt Mehrschleifensteuerung (Position, Geschwindigkeit, Drehmoment und MIT-Hybridmodus), verfügt über Plug-and-Play-Steckverbinder und adaptive PID-Einstellung sowie integrierte Schutzfunktionen gegen Überstrom, Über-/Unterspannung und Überhitzung für zuverlässigen Betrieb in anspruchsvollen Umgebungen.
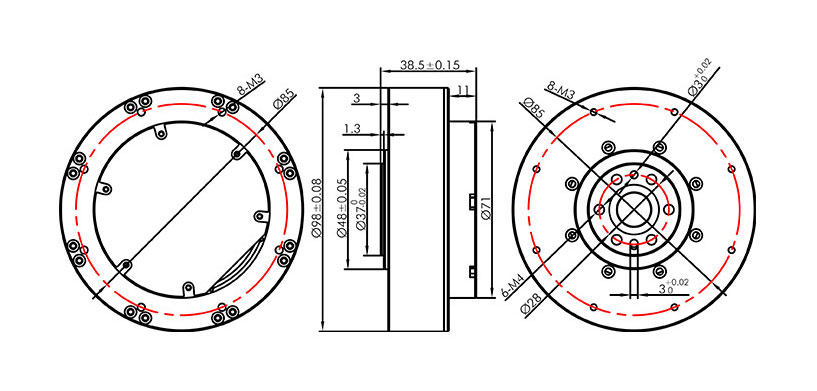
Motorabmessungen: Ф98*38,5mm
Motorgewicht: 485g
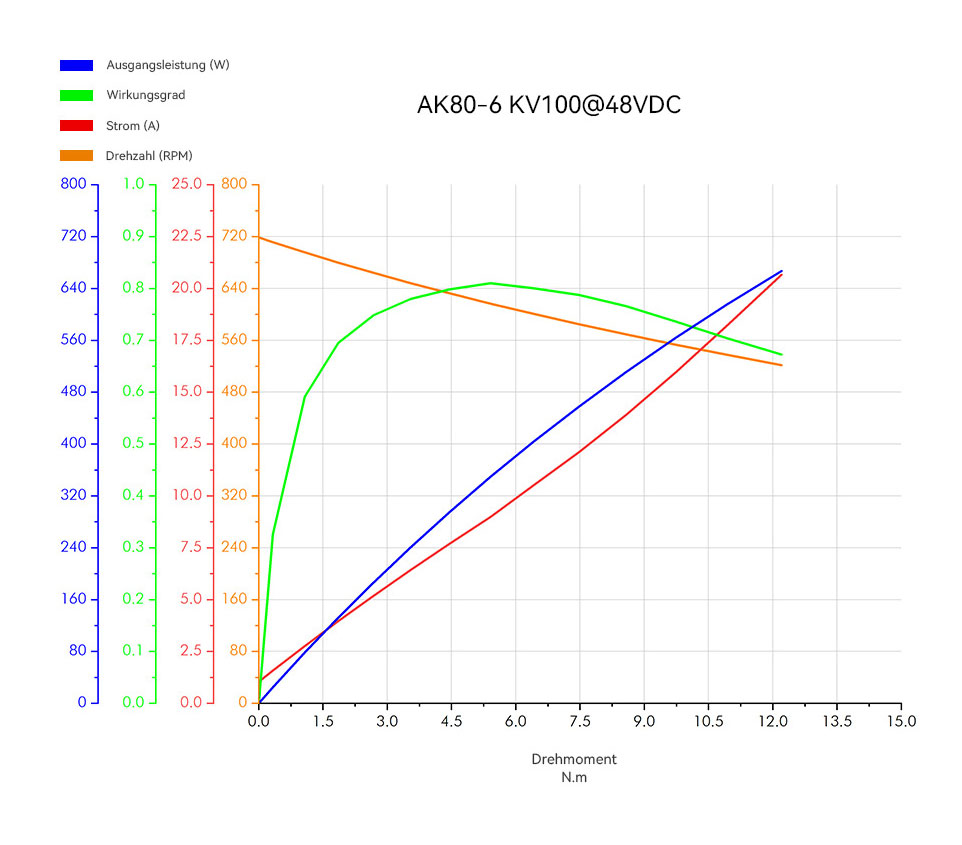
Spitzen Drehmoment: 12Nm
Leerlaufdrehzahl: 800 U/min
Hohe Drehmomentdichte: Liefert 6 Nm Nenn- und 12 Nm Spitzendrehmoment in kompakter Bauform, ideal für Mittelbelastungsanwendungen
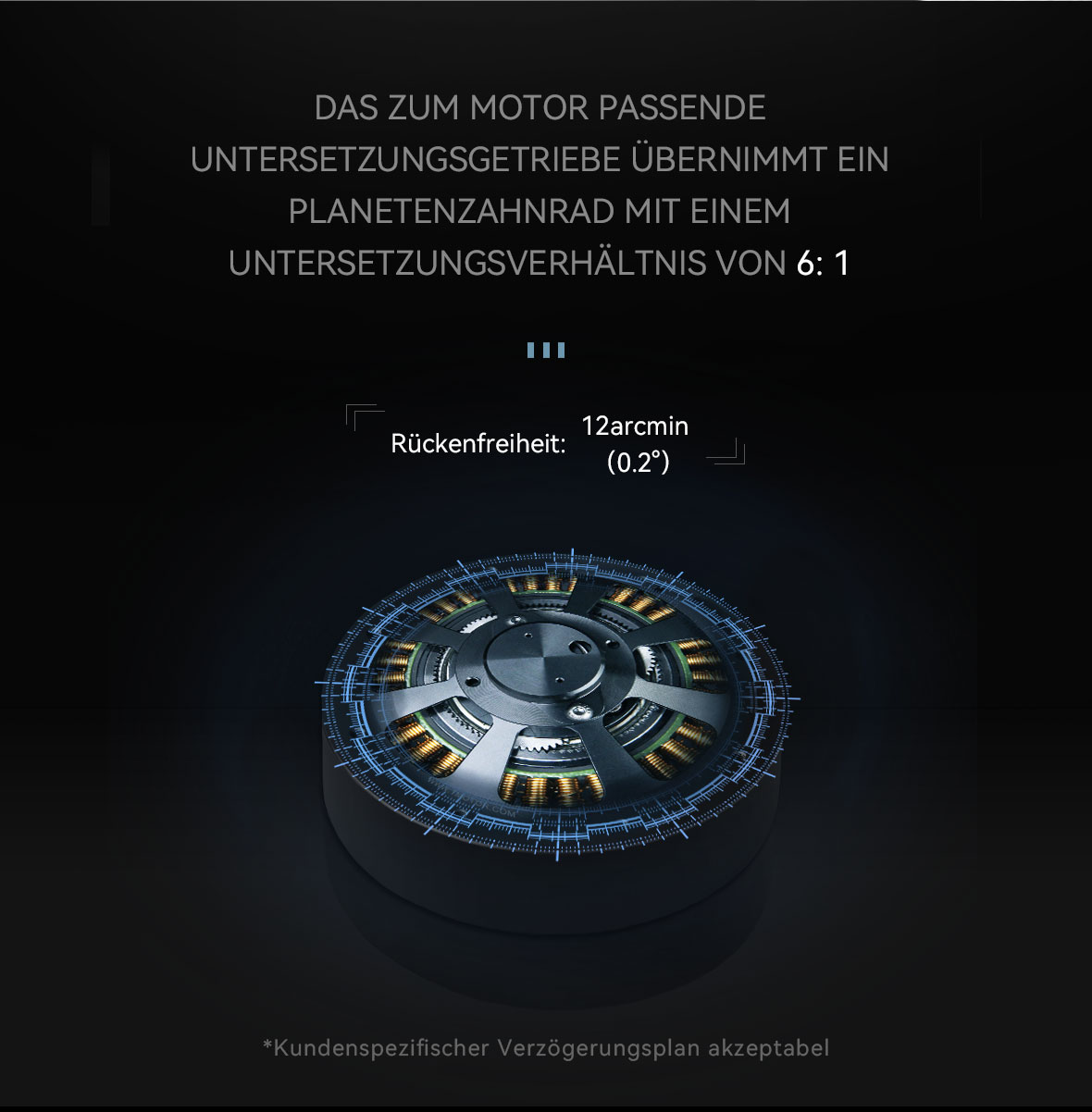
Schnelle Reaktion: 6:1-Übersetzung balanciert Geschwindigkeit und Dynamik, unterstützt Mehrschleifensteuerung
Präzise Rückmeldung: Integrierter 14-Bit-Magnetencoder gewährleistet hochauflösende Rückmeldung und stabile Positionierung
Zuverlässiger Schutz: Integrierter Schutz gegen Überstrom, Über-/Unterspannung und Überhitzung erhöht die langfristige Stabilität
Leicht und robust: Gewicht nur 485g, optimiert für Exoskelette, Quadruped-Roboter und Gelenkantriebsmodule
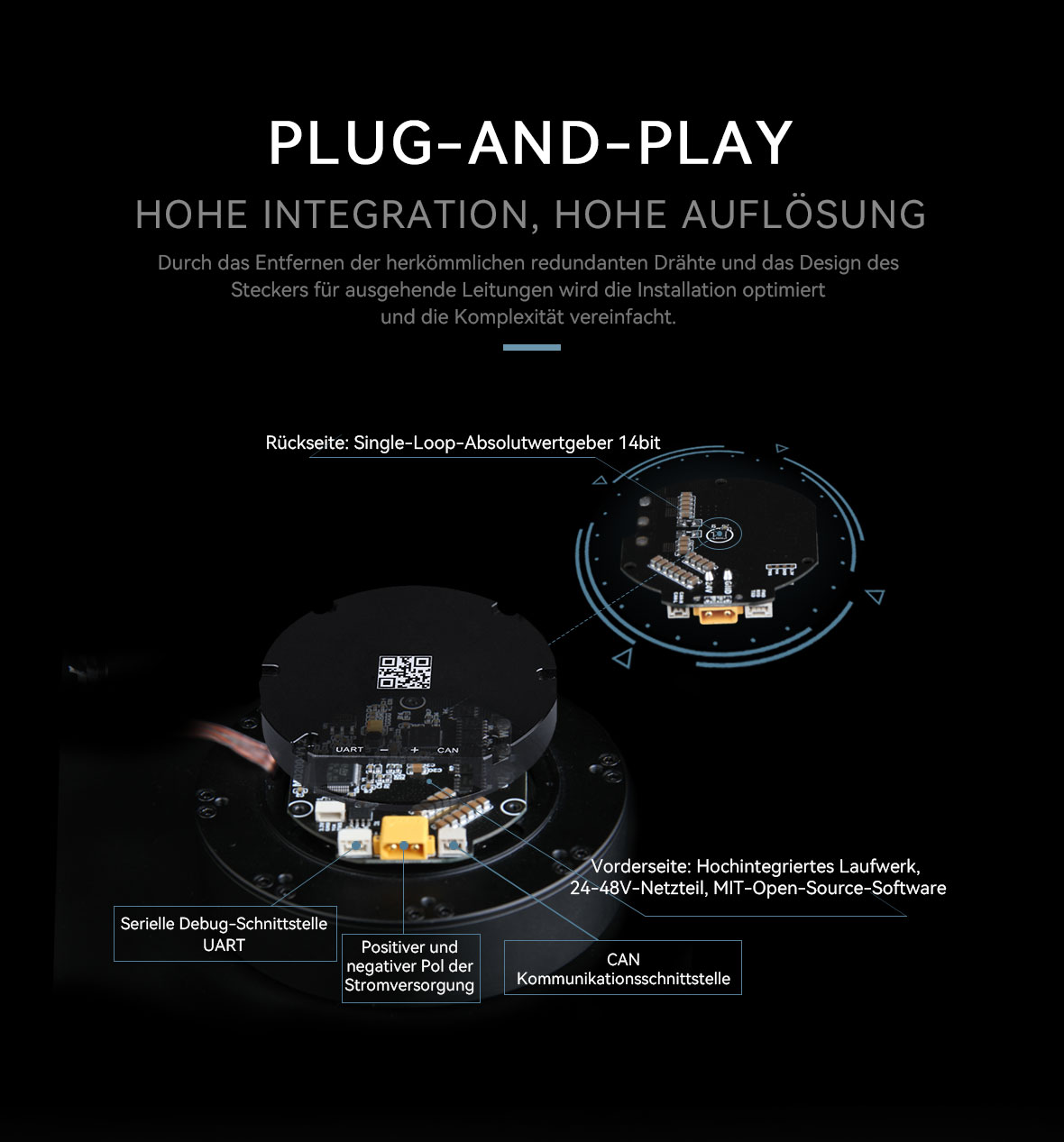
Optimierte Konnektivität: Steck-Schnittstelle ersetzt traditionelle Verkabelung zur Reduzierung von Verbindungsfehlern; unterstützt CAN und UART für nahtlose Systemintegration
AK80-6 KV100 Aktuator x1
Netzkabel x1
Serielles CAN-Kabel x1
Konformitätszertifikat x1
R-link V2.0
Treiberplatine V2.1
Verkabelungspaket V2.0




| Anwendungsbereiche | Fußroboter, Exoskelett, AGV | Spitzendrehmoment Nm | 12 |
| Betriebsart | FOC | Spitzenstrom ADC | 20 |
| Betriebsumgebungstemperatur | -20℃~50℃ | Drehzahl konstant rpm/V | 100 |
| Anschluss der Spule | Delta | Drehmomentkonstante Nm/A | 0.105 |
| Isolationsklasse | H | Konstante der inversen EMK V/krpm | 10.5 |
| Stehende Isolationsspannung | 1000V 5mA/2s | Leitungswiderstand mΩ | 170 |
| Isolationswiderstand | 1000V10MΩ | Leitungsinduktivität μH | 57 |
| Anzahl der Phasen | 3 | Trägheit gcm² | 607 |
| Anzahl der Polpaare | 21 | Motorkonstante Nm/√W | 0.25 |
| Untersetzungsverhältnis | 6:01 | Elektromechanische Zeitkonstante ms | 0.94 |
| Drehmoment des Rückwärtsantriebs Nm | 0.36 | Elektrische Zeitkonstante ms | 0.34 |
| Getriebespiel ° | 0.22 | Gewicht g | 485 |
| Warmes Gefühl | None | Maximale Drehmomentdichte Nm/kg | 24 |
| Rauschen dB Abstand vom Motor 65CM | 55 | Entsprechung der CAN-Schnittstelle | A1257WR-S-4P |
| Dynamische Tragzahl C N | 2760 | Entsprechung der UART-Schnittstelle | A1257WR-S-3P |
| Statische Tragzahl C0 N | 2810 | Der Leistungsstecker entspricht dem Leistungsstecker | XT30PW-M |
| Nennspannung V | 48 | Typ des Innenkreis-Encoders | Magnetischer impuls |
| Nenndrehmoment Nm | 6 | Auflösung des inneren Ringgebers | 14bit |
| Nenndrehzahl rpm | 603 | Äußerer Ringgeber-Typ | - |
| Nennstrom ADC | 9.7 | Auflösung des äußeren Ringgebers | - |
| Anzahl der Encoder | 1 |
| Kategorie | Modell | Nenn Spannung (V) | Nenn Leistung (W) | Nenn Drehmoment (Nm) | Nenn Strom (A) | Nenn Drehzahl (RPM) | Spitzen Drehmoment (Nm) | Spitzenstrom (A) | Leerlauf Drehzahl (RPM) | Untersetzungs verhältnis | Gewicht (G) | Größe (Durchmesser × Länge)MM | Driver Board | Encoder | Operation |
| AK Serie Roboteraktuator | AK10-9 V3.0 KV60 | 48 | 442 | 18 | 10.7 | 235 | 53 | 31.9 | 320 | 9:1 | 940 | Ф98*61.7 | Yes | Dual |  |
| AK Serie Roboteraktuator | AK10-9 V2.0 KV60 | 24/48 | 430 | 18 | 10.6 | 109/228 | 48 | 29.8 | 160/320 | 9:1 | 960 | Ф98*61.7 | Yes | Dual | |
| AK Serie Roboteraktuator | AK80-9 V3.0 KV100 | 48 | 368 | 9 | 12 | 390 | 22 | 28 | 570 | 9:1 | 490 | Ф98*38.5 | Yes | Single | |
| AK Serie Roboteraktuator | AK80-8 KV60 | 48 | 230 | 10 | 6.9 | 243 | 25 | 21 | 360 | 8:1 | 570 | Ф98*43.9 | Yes | Dual | |
| AK Serie Roboteraktuator | AK80-6 KV100 | 48 | 340 | 6 | 9.7 | 603 | 12 | 20 | 800 | 6:1 | 485 | Ф98*38.5 | Yes | Single | |
| AK Serie Roboteraktuator | AK80-64 KV80 | 24/48 | 220 | 48 | 7 | 23/48 | 120 | 19 | 37/75 | 64:1 | 850 | Ф98*61.9 | Yes | Single | |
| AK Serie Roboteraktuator | AK70-10 KV100 | 24/48 | 230 | 8.3 | 7.2 | 148/310 | 24.8 | 23.2 | 240/480 | 10:1 | 521 | Ф89*50.25 | Yes | Single | |
| AK Serie Roboteraktuator | AK70-9 V3.0 KV60 | 48 | 231 | 8.5 | 6.25 | 260 | 29.2 | 23.8 | 320 | 9:1 | 540 | Ф89*49 | Yes | Dual | |
| AKH-Serie Hohlwellen-Planetenaktuator | AKH70-48 V1.0 KV41 | 48 | 217 | 74 | 6 | 28 | 222 | 21 | 35 | 48:1 | 1396 | φ90*81.5 | Yes | Dual | |
| AK Serie Roboteraktuator | AK60-6 V3.0 KV80 | 24/48 | 74 | 3 | 3.8 | 233/490 | 9 | 10.3/11.2 | 320/640 | 6:1 | 380 | Ф79*43 | Yes | Single | |
| AK Serie Roboteraktuator | AK60-39 V3.0 KV80 | 48 | 176 | 24 | 4.5 | 70 | 72 | 17 | 98 | 39:1 | 750 | Ф79*67 | Yes | Dual | |
| AK Serie Roboteraktuator | AK60-6 V1.1 KV140 | 24 | 130 | 3 | 6.5 | 420 | 9 | 22.7 | 560 | 6:1 | 368 | Ф79*39.5 | Yes | Single | |
| AK Serie Roboteraktuator | AK60-6 V1.1 KV80 | 24 | 74 | 3 | 3.8 | 233 | 9 | 13.1 | 320 | 6:1 | 368 | Ф79*39.5 | Yes | Single | |
| AK Serie Roboteraktuator | AK45-36 KV80 | 24 | 33 | 8 | 2 | 40 | 24 | 6.5 | 52 | 36:1 | 340 | φ55*54 | Yes | Single | |
| AK Serie Roboteraktuator | AK45-10 KV75 | 24 | 39 | 2.5 | 2.1 | 150 | 7 | 5 | 180 | 10:1 | 260 | Ф53*43 | Yes | Single | |
| AK Serie Roboteraktuator | AK40-10 KV170 | 24 | 59 | 1.3 | 2.7 | 370 | 4.1 | 7.3 | 435 | 10:1 | 185 | φ53*37 | Yes | Single | |
| AKE-Serie Quasi-Direktantriebsmotor | AKE90-8 KV35 | 48 | 700 | 55 | 21 | 120 | 170 | 72 | 210 | 8:1 | 1400 | Ф107.5*43.5 | No | |
|
| AKE-Serie Quasi-Direktantriebsmotor | AKE80-8 KV30 | 48 | 188 | 12 | 4.8 | 150 | 30 | 12 | 195 | 8:1 | 570 | Ф87*32 | No | |
|
| AKE-Serie Quasi-Direktantriebsmotor | AKE60-8 KV80 | 24 | 95 | 5 | 4.8 | 180 | 12.5 | 12 | 240 | 8:1 | 260 | Ф69*25 | No | |
|
| AKA Serie Roboteraktuator | AKA10-9 KV60 | 48 | 205 | 18 | 10.6 | 109 | 53 | 32 | 320 | 9:1 | 1060 | ∅100*70 | Yes | Single | |
| AKA Serie Roboteraktuator | AKA60-6 KV80 | 24/48 | 62 | 3 | 4 | 200/400 | 9 | 11.2 | 320/640 | 6∶1 | 460 | Ф80*51.2 | Yes | Single | |
| AKH-Serie Hohlwellen-Planetenaktuator | AKH70-16 V1.0 KV41 | 48 | 245 | 26 | 6.5 | 90 | 85 | 23 | 105 | 16:1 | 879 | φ90*60.5 | Yes | Dual | |




