Registrieren

In den letzten Jahrzehnten haben robotische Exoskelette und tragbare Geräte ein rasantes Wachstum erlebt und sind zu unverzichtbaren Werkzeugen in der Rehabilitation und Mobilitätshilfe geworden. Bei der Knie-Rehabilitation bieten Exoskelette aktive Unterstützung und erweiterte Funktionalität, verbessern die Effizienz der Genesung von Patienten und reduzieren gleichzeitig die Arbeitsbelastung für Physiotherapeuten.
Ein Forscherteam der Khalifa University entwickelte ein neuartiges Knieexoskelett mit anpassbarer Steifigkeit, um die Einschränkungen herkömmlicher Systeme zu überwinden, die oft nur einen engen Steifigkeitsbereich oder eine langsame Reaktion bieten. Dieses neue Design ermöglicht eine Echtzeit-Anpassung der Steifigkeit während des gesamten Gangzyklus und repliziert genau die natürliche Variation der Kniegelenksteifigkeit des Menschen.
Studien zeigen, dass während des normalen Gehens das Kniegelenk einen Bewegungsbereich von etwa 10°–105° benötigt, wobei der Drehmomentbedarf von etwa 40 N·m auf flachem Boden auf mehr als 100 N·m beim Treppensteigen ansteigt. Die Kniegelenksteifigkeit selbst schwankt im gesamten Gangzyklus erheblich – von bis zu 450 N·m/rad in der frühen Standphase bis zu etwa 30 N·m/rad am Ende der Stützphase. Das Design der Khalifa University entspricht erfolgreich diesen biomechanischen Anforderungen und bietet einen optimalen Steifigkeitsbereich von 30 bis 450 N·m/rad.
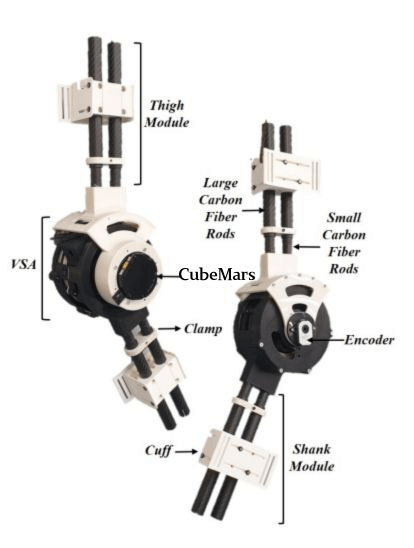
Um diese Leistung zu erreichen, integriert das System den CubeMars AK80-64 KV80 Exoskelettmotor als externen Hochdrehmoment-Aktor zur Steuerung des Variablen Steifigkeitsaktors (VSA). Der AK80-64 bietet die Präzision und Leistung, die benötigt werden, um natürliche Kniebewegungen nachzubilden:
Hohe Drehmomentdichte – Kompakte Größe mit starker Leistungsausgabe, ideal für Exoskelette der unteren Extremitäten.
Präzise Steuerung – Ermöglicht schnelle Steifigkeitswechsel zu Beginn des Gangzyklus und sanftere Anpassungen während der Schwungphase.
Energieeffizienz – Verlängert die Betriebszeit und reduziert den Stromverbrauch während der Rehabilitationssitzungen.
Nahtlose Integration – Modulares Design vereinfacht die Integration in robotische Exoskelett-Systeme.
Produkt | Größe | Gewicht | Nenn RPM | Nenn Drehmoment | Spitzendrehmoment | Maximale Drehmomentdichte |
AK80-64 KV80 | 98×62 mm | 850 g | 48 rpm | 48 Nm | 120 Nm | 141,2 Nm/kg |

Experimentelle Validierung und Ergebnisse
Tests bestätigten, dass der Prototyp die Steifigkeit dynamisch in Einklang mit der menschlichen Biomechanik anpassen und Veränderungen der Kniegelenksteifigkeit bei Gehgeschwindigkeiten von 1,0–1,5 m/s genau verfolgen konnte. Im Vergleich zu früheren Designs war die Reaktionsgeschwindigkeit erheblich verbessert, was sichere, natürliche und effiziente Gangrehabilitation ermöglicht.
Diese Zusammenarbeit unterstreicht sowohl das Potenzial von Exoskeletten mit variabler Steifigkeit für die klinische Rehabilitation als auch die Zuverlässigkeit der CubeMars-Aktoren in der Spitzentechnologie der Robotik. Mit ihrer bewährten hohen Leistung unterstützt der CubeMars AK80-64 Roboteraktor weiterhin Forschung und industrielle Anwendungen in der Rehabilitationsrobotik, in tragbaren Exoskeletten und in Mensch-Roboter-Interaktionssystemen.


