创建您的CubeMars账号

近十年来,外骨骼与可穿戴机器人技术迅速发展,成为康复医疗和助行领域的重要装备。在膝关节康复场景中,外骨骼不仅能够提供主动支撑,提升患者训练效率,还有效降低了康复治疗师的工作负荷,实现了更接近“人类生物力学”的康复体验。
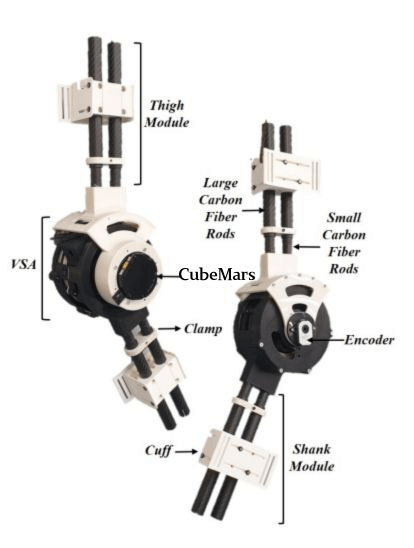
该校科研团队针对传统康复外骨骼“刚度调节范围有限、响应速度慢”等问题,研发出一款具有可调顺应性的膝关节外骨骼(Variable Stiffness Knee Exoskeleton)。其核心亮点在于——能够在步态周期内实时调节关节刚度,精准模拟人体膝关节在行走过程中的自然变化。
研究表明,人在正常行走时膝关节活动范围约为 10°–105°,在平地行走时关节扭矩约为 40 Nm,而在下楼梯时甚至超过 100 Nm。膝关节刚度在步态周期中同样波动明显:从支撑初期的 450 Nm/rad 降至末期的 30 Nm/rad。Khalifa University 的设计成功覆盖了这一全范围,实现了 30–450 Nm/rad 的动态刚度调节能力。
为了实现上述性能,系统选用了 CubeMars AK80-64 KV80高扭矩机器人动力模组作为外置驱动源,为可变刚度执行机构(VSA)提供高效动力支持。
高扭矩密度:结构紧凑但力量强劲,非常适合下肢外骨骼使用
精准控制能力:让步态初期的刚度切换迅速敏捷,摆动阶段更平顺
节能高效:延长训练时长,降低整体能耗
模块化设计:便于嵌入各类康复与穿戴式机器人结构
型号 | 尺寸 | 重量 | 额定转速 | 额定扭矩 | 峰值扭矩 | 扭矩密度 |
AK80-64 KV80 | 98×62 mm | 850 g | 48 rpm | 48 Nm | 120 Nm | 141.2 Nm/kg |

测试结果显示,该原型机能够在 1.0–1.5 m/s 的正常行走速度下,准确匹配人体膝关节刚度变化趋势,并实现比以往方案更高的响应速度,使患者在康复训练中获得更自然、更安全、更高效的行走体验。
该研究不仅展示了可变刚度膝关节外骨骼在临床康复中的巨大潜力,也再次验证了 CubeMars外骨骼电机在高性能康复机器人领域的可靠性与领先性。
未来,CubeMars将持续支持可穿戴机器人、医疗康复设备以及人机交互系统的创新探索,与科研机构及产业伙伴共同推动“人人可用的智能康复技术”走向现实。


.png)


