Créer votre compte CubeMars

Nikodem Bartnik a créé un châssis robotique puissant à l’aide des actionneurs de la série AK de CubeMars et d’Arduino
Après avoir tenté d’intégrer plusieurs actionneurs robotiques AK80-9 KV100 de CubeMars dans un projet de bras robotique, le YouTuber Nikodem Bartnik a finalement dû réorienter son projet vers un autre type d’application : un châssis / une plateforme robotique universelle. Grâce à ces moteurs à la fois puissants et de haute précision, son robot peut se déplacer rapidement tout en conservant une grande précision sur le sol.
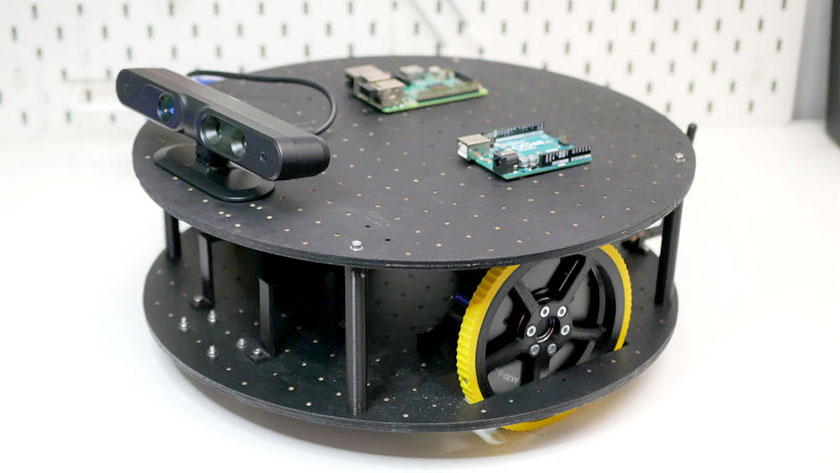
Une fois une plaque plane découpée dans du contreplaqué à l’aide d’une fraiseuse CNC, Bartnik a monté les deux moteurs et fixé une roue sur chacun d’eux. Pour le contrôle des moteurs, il a utilisé une seule Arduino Uno et conçu un PCB personnalisé permettant de transmettre les signaux du bus CAN entre l’Arduino et les deux moteurs. L’ensemble est alimenté par deux batteries LiPo, fournissant une tension totale d’environ 24 V.

À l’heure actuelle, le robot fonctionne essentiellement comme une voiture télécommandée, réagissant aux commandes reçues à distance. Dans le projet de Bartnik, un second Arduino Uno est connecté à un ordinateur portable via USB et équipé d’un module radio nRF24, permettant l’envoi sans fil des données vers le module nRF24 embarqué sur le robot. Il a également développé un script Python permettant de définir la vitesse de déplacement du robot et de convertir les pressions sur les touches directionnelles en mouvements correspondants.
Vous pouvez visionner la vidéo de Bartnik ci-dessous pour plus d’informations ou consulter son dépôt GitHub pour accéder au code du projet et aux fichiers de conception.