Create your CubeMars account

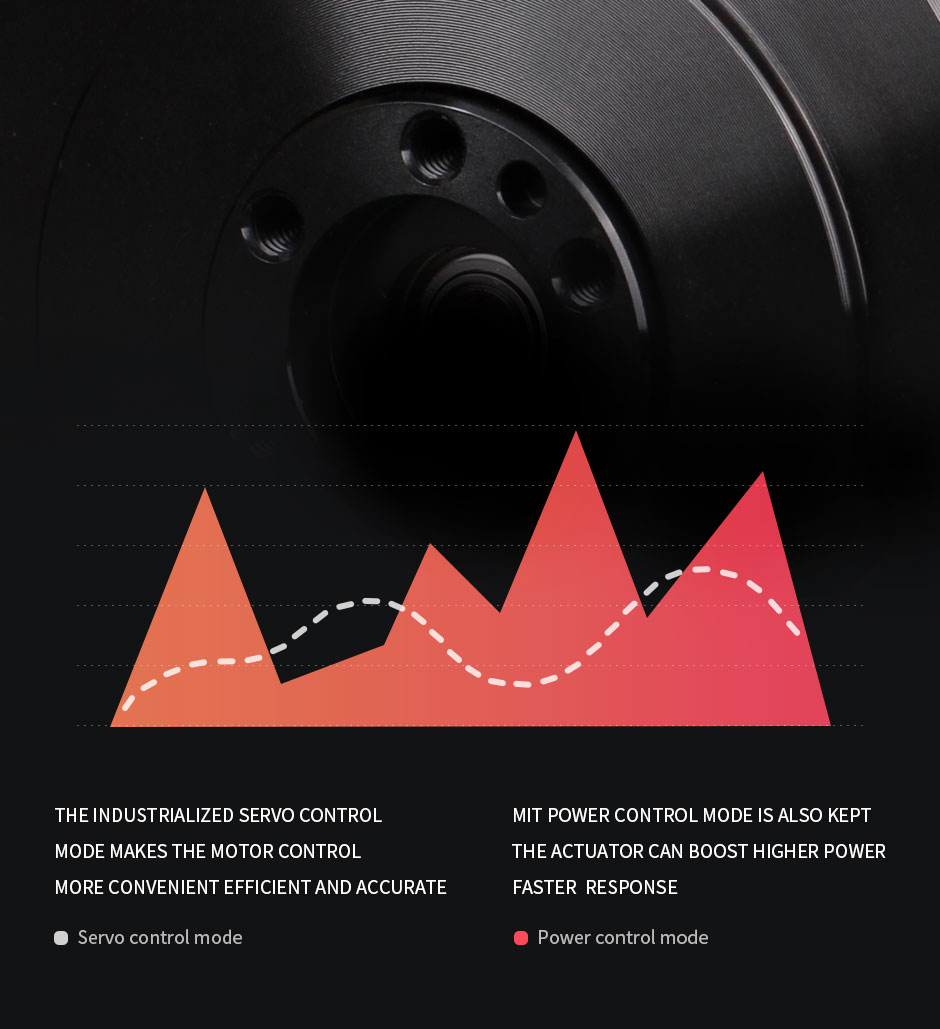
The CubeMars AK10-9 V2.0 KV60 robotic actuator integrates a brushless DC motor, proprietary planetary gearbox, and driver board into a compact, easy-to-install unit. Featuring a 9:1 planetary reduction, it balances response speed and output torque performance. The module supports dual control modes—servo and MIT control—features plug-in connectors and automatic PID parameter identification, and includes built-in protection against overcurrent, overvoltage/undervoltage, and overheating for safe and reliable operation in complex environments.
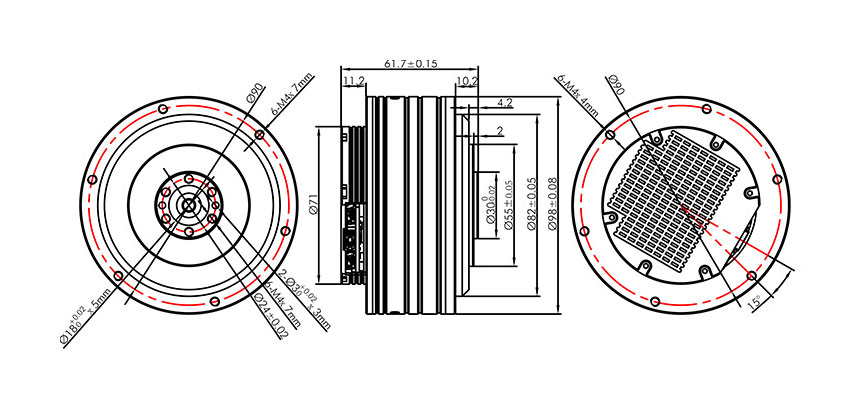
Motor Dimensions: Ф98*61.7mm
Motor Weight: 960g
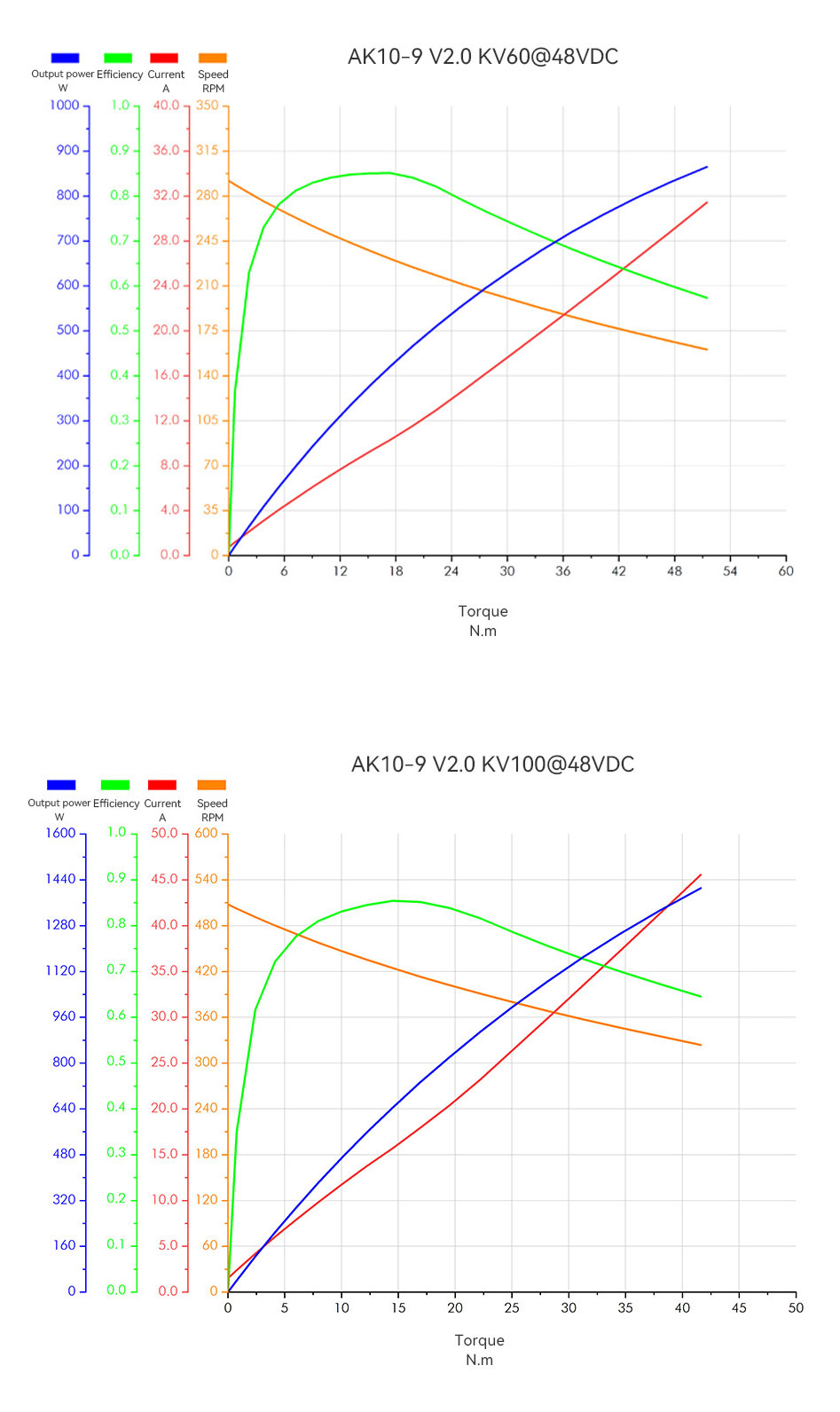
Peak Torque: 48Nm
No-load Speed: 320rpm
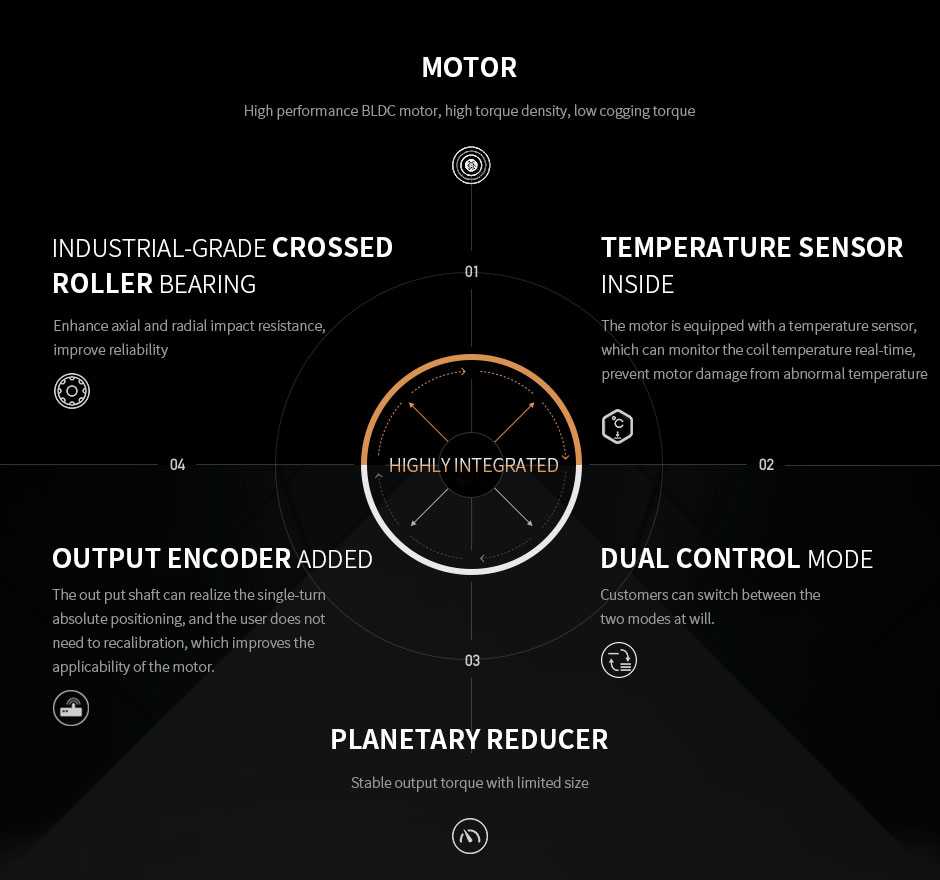
Fully Integrated Design: Motor, gearbox, driver, and encoder are combined into a single unit, greatly simplifying wiring and installation
Excellent Torque Density: 48 Nm peak torque / 0.96 kg weight ⇒ maximum torque density of approximately 50 Nm/kg
Dual Control Mode Support: Supports both servo and MIT control modes, suitable for a wider range of applications
Auto-tuning Capability: Module features adaptive PID parameter identification, reducing adjusting time
Comprehensive Protection: Built-in overcurrent, overvoltage/undervoltage, and overtemperature protection enhances reliability
Plug-in Connection Design: Simplifies connections between modules and external controllers, improving assembly efficiency
Wide Application Range: Recommended for legged robots, exoskeleton systems, AGVs, and joint modules
AK10-9 V2.0 KV60 Actuator (Comes standard with a driver board)x1
Power Cable x1
Serial CAN Cable x1
Certificate of Conformance x1
R-link V2.0
Wiring Package V2.0
Report-Why choose AK10-9 for steering.pdf


| Application | Legged Robot,Exoskeleton,AGV | Peak torque (Nm) | 48 |
| Driving way | FOC | Peak current (ADC) | 29.8 |
| Operation ambient temperature | -20℃~50℃ | Kv (rpm/V) | 60 |
| Winding type | star | Kt (Nm/A) | 0.198 |
| Insulation class | C | Ke (V/krpm) | 17.2 |
| Insulation High-voltage | 1000V 5mA/2s | Phase to Phase resistance (mΩ) | 195 |
| Insulation resistance | 1000V 10MΩ | Phase to Phase inductance (μH) | 181 |
| Phase | 3 | Inertia (gcm²) | 1002 |
| Pole pairs | 21 | Km (Nm/√W) | 0.45 |
| Reduction ratio | 9:1 | Mechanical time constant (ms) | 0.5 |
| Back drive(Nm) | 0.8 | Electrical time constant (ms) | 0.93 |
| Backlash (°) | 0.33 | Weight (g) | 960 |
| Temperature sensor | NTC MF51B 103F3950 | Maximum torque weight ratio (Nm/kg) | 50 |
| Noise dB 65CM away the motor | 65 | CAN connector | A1257WR-S-4P |
| Basic load ratings (dyn. C ) N | 2000 | UART connector | A1257WR-S-3P |
| Basic load ratings (stat.C0) N | 2520 | Power connector | XT30PW-M |
| Rated voltage (V) | 24/48 | Inner loop encoder type | Magnetic encoder |
| Rated torque (Nm) | 18 | Inner ring encoder resolution | 14bit |
| Rated speed (rpm) | 109/228 | Outer ring encoder type | Magnetic encoder |
| Rated current (ADC) | 10.6 | Outer ring encoder resolution | 15bit |
| Number of encoder | 2 |
![]() AK Series Driver and Control Manual v1.0.15.X.pdf
AK Series Driver and Control Manual v1.0.15.X.pdf
![]() Report-Why choose AK10-9 for steering.pdf
Report-Why choose AK10-9 for steering.pdf
Want to share your CubeMars experience or open-source work? Contact us—we’re open to more collaborations!