Registrieren

Der CubeMars AK70-10 KV100 Roboteraktuator integriert einen leistungsstarken bürstenlosen Gleichstrommotor, ein 10:1-Planetengetriebe, eine Treiberplatine und einen Encoder in eine kompakte, einfach zu installierende Einheit. Mit einer Übersetzung von 10:1 liefert er eine erhöhte Drehmomentausgabe bei gleichzeitiger schneller Reaktionszeit. Das Modul unterstützt Mehrschleifensteuerung (Position, Geschwindigkeit, Drehmoment und MIT-Hybridmodus), umfasst Plug-and-Play-Steckverbinder und automatische PID-Parameteridentifizierung sowie integrierte Schutzfunktionen gegen Überstrom, Über- und Unterspannung sowie Überhitzung für stabile Betriebsbedingungen in anspruchsvollen Umgebungen.
Motorabmessungen: Ф89*50,25mm
Motorgewicht: 521g
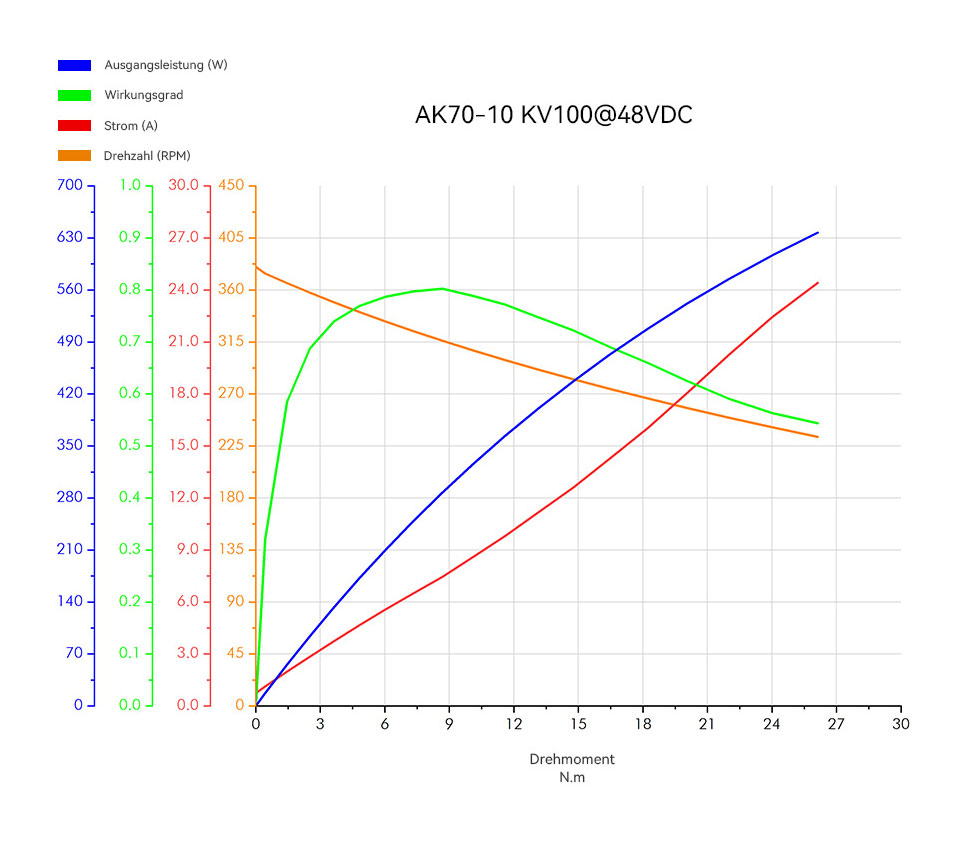
Spitzendrehmoment: 24,8Nm
Leerlaufdrehzahl: 480rpm
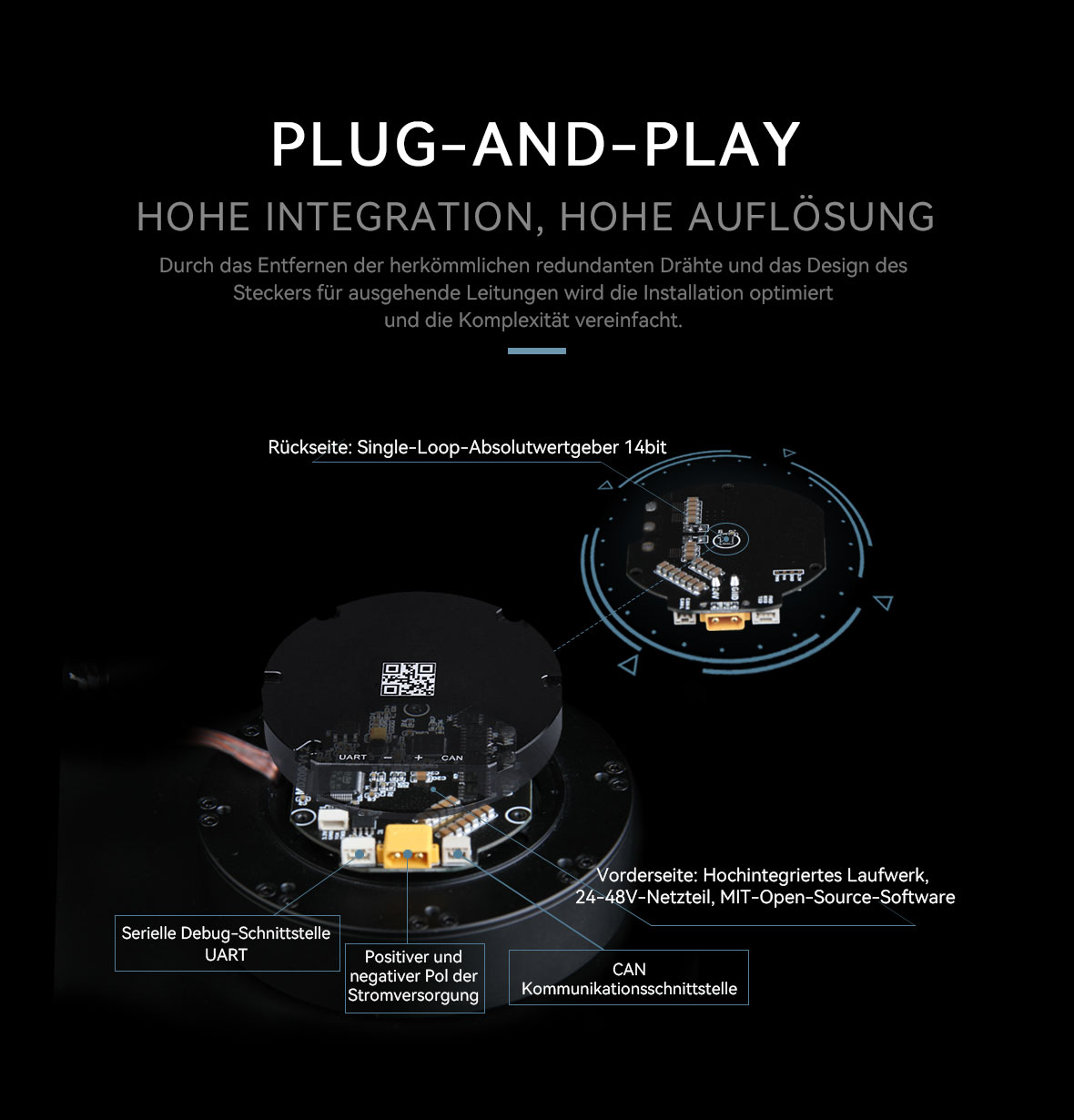
Integriertes Design: All-in-One-Integration von Motor, Planetengetriebe, Treiber und Encoder reduziert die Systemkomplexität signifikant
Hohe Drehmomentdichte: Nennausgabe bis zu 8,3 Nm, Spitzenwert bis zu 24,8 Nm, geeignet für mittel- bis hochbelastende Anwendungen
Hohe Präzisionsrückmeldung: 14-Bit-Magnetencoder ermöglicht genaue Positions- und Geschwindigkeitssteuerung
Flexible Steuerungsmodi: Unterstützt Positions-, Geschwindigkeits-, Drehmoment- und MIT-Hybridsteuerungsmodi
Umfassender Schutz: Integrierter Schutz gegen Überstrom, Über- und Unterspannung sowie Überhitzung gewährleistet langfristige Zuverlässigkeit
Breites Anwendungsgebiet: Entwickelt für Exoskelette, Quadruped-Roboter, kollaborative Arme und andere dynamische Robotersysteme
AK70-10 KV100 Aktuator (Die Standardkonfiguration umfasst eine Driver Board)x1
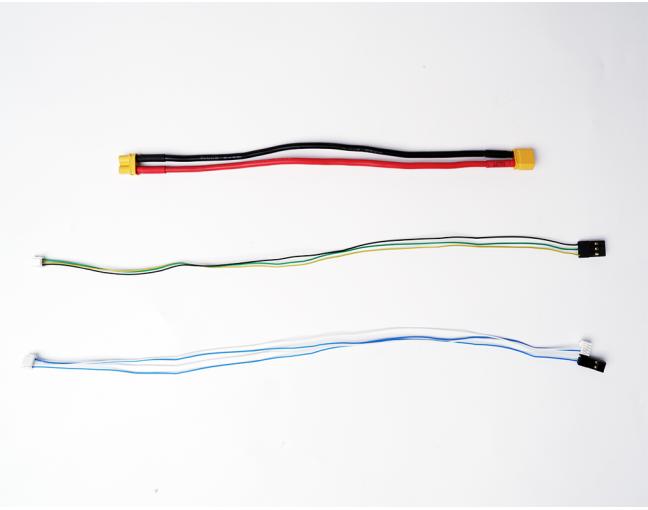
Stromkabel x1
Serielles CAN-Kabel x1
Konformitätszertifikat x1
R-link V2.0
Verkabelungspaket V2.0





| Anwendungsbereiche | Fußroboter, Exoskelett, AGV | Spitzendrehmoment Nm | 24.8 | |
| Betriebsart | FOC | Spitzenstrom ADC | 23.2 | |
| Betriebsumgebungstemperatur | -20℃~50℃ | Drehzahl konstant rpm/V | 100 | |
| Anschluss der Spule | Delta | Drehmomentkonstante Nm/A | 0.123 | |
| Isolationsklasse | H | Konstante der inversen EMK V/krpm | 11.2 | |
| Stehende Isolationsspannung | 1000V 5mA/2s | Leitungswiderstand mΩ | 272 | |
| Isolationswiderstand | 1000V10MΩ | Leitungsinduktivität μH | 113 | |
| Anzahl der Phasen | 3 | Trägheit gcm² | 753.4788 | |
| Anzahl der Polpaare | 21 | Motorkonstante Nm/√W | 0.24 | |
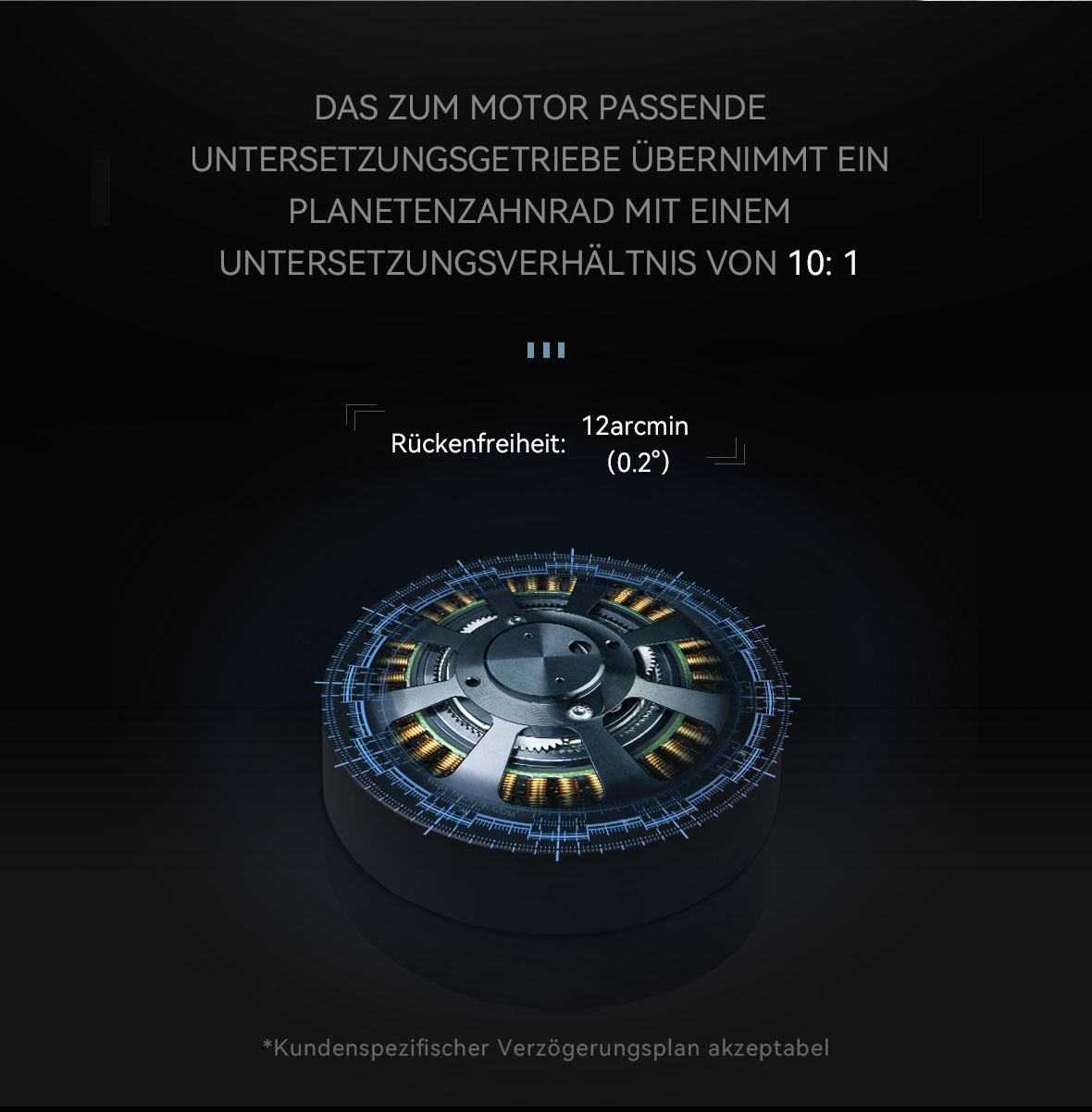
| Untersetzungsverhältnis | 10:01 | Elektromechanische Zeitkonstante ms | 0.74 | |
| Drehmoment des Rückwärtsantriebs Nm | 0.48 | Elektrische Zeitkonstante ms | 0.42 | |
| Getriebespiel ° | 0.12 | Gewicht g | 521 | |
| Warmes Gefühl | NTC MF51B 103F3950 | Maximale Drehmomentdichte Nm/kg | 47.6 | |
| Rauschen dB Abstand vom Motor 65CM | 58 | Entsprechung der CAN-Schnittstelle | A1257WR-S-4P | |
| Dynamische Tragzahl C N | 2000 | Entsprechung der UART-Schnittstelle | A1257WR-S-3P | |
| Statische Tragzahl C0 N | 2520 | Der Leistungsstecker entspricht dem Leistungsstecker | XT30PW-M | |
| Nennspannung V | 24/48 | Typ des Innenkreis-Encoders | Magnetischer impuls | |
| Nenndrehmoment Nm | 8.3 | Auflösung des inneren Ringgebers | 14bit | |
| Nenndrehzahl rpm | 148/310 | Äußerer Ringgeber-Typ | - | |
| Nennstrom ADC | 7.2 | Auflösung des äußeren Ringgebers | - | |
| Anzahl der Encoder | 1 |