创建您的CubeMars账号

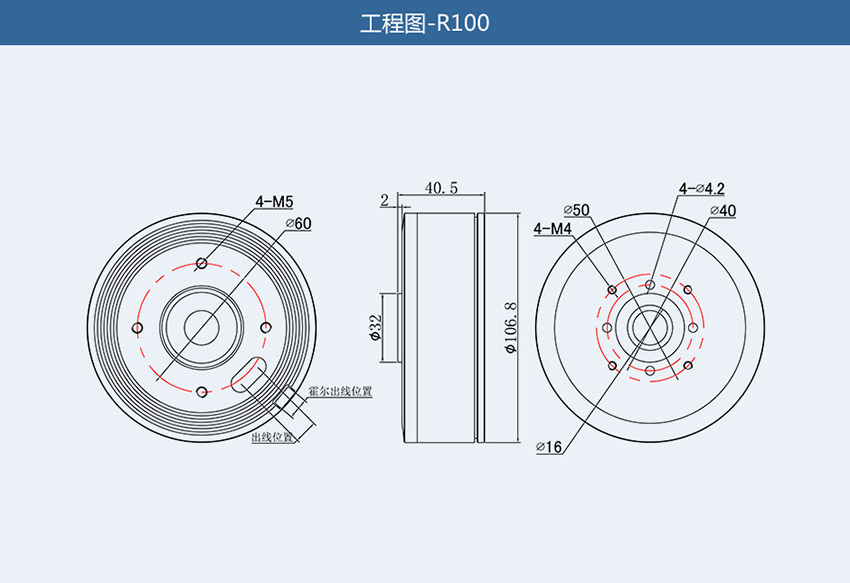
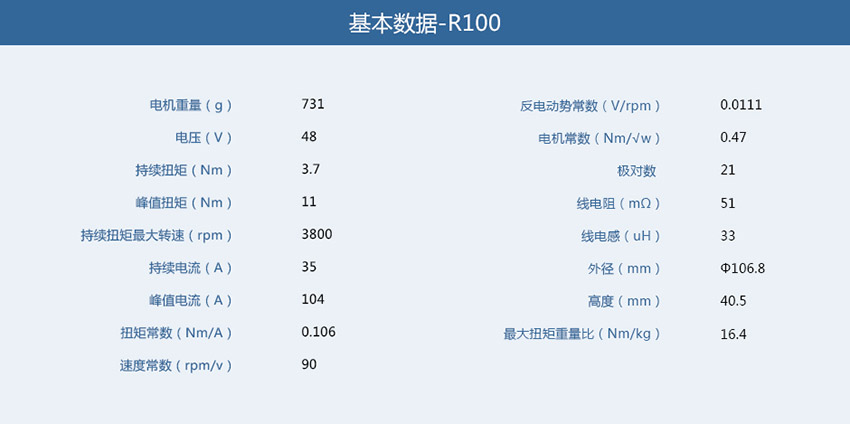
R系列外转力矩电机R100内置霍尔传感器,电气角度120±20℃。R100电机的特殊散热设计,采用超薄定子端盖+高导热比硅胶垫,降低整体安装高度的同时,也实现了机体散热功能,运行无忧。
在减速器安装方面,我们在转子端盖预留安装孔位,客户可以直接匹配对应谐波减速器或法兰安装其他类型减速器,以满足更大扭矩的需求。
R100 KV90采用了出线插头设计,去除传统冗余线材,优化安装,轻松便捷,化繁为简。
外转力矩电机R100低齿槽转矩,低转动惯量。不管行走,弹跳,奔跑,还是多种姿态,都要平稳运行!
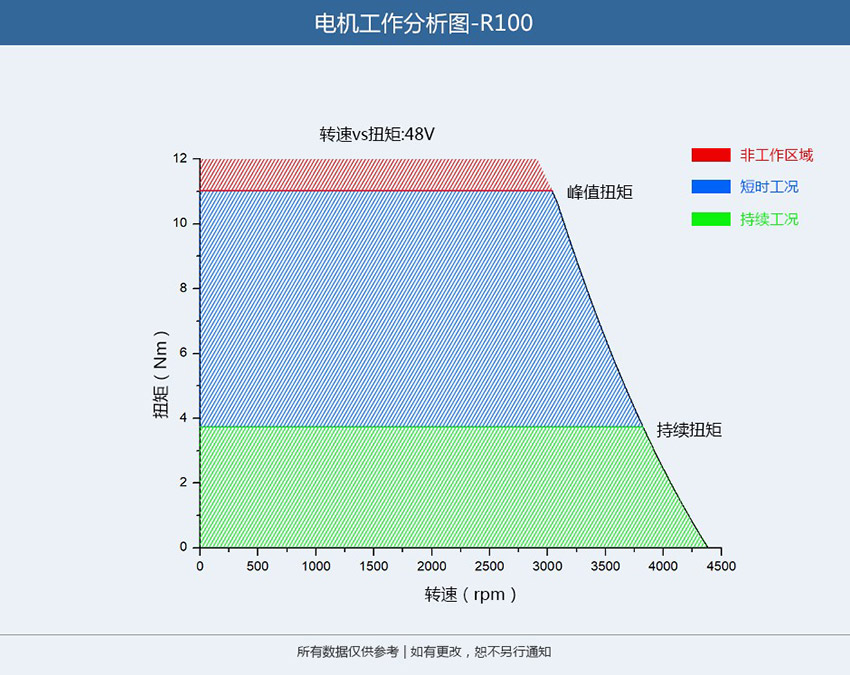
R100 KV90生而强悍,动力十足,为载重大的足式机器人设计,更大扭矩(2.3-11Nm),更加稳定。