创建您的CubeMars账号











CubeMars AK80-6 KV100 机器人动力模组将高性能无刷直流电机、6:1 行星减速器、编码器与驱动板高度集成于一体,结构紧凑、安装便捷。它在兼顾响应速度的基础上提供稳定的扭矩输出。该模组支持多闭环控制(如位置、速度、力矩及 MIT 混合控制模式),采用插口式连接设计与自适应 PID 参数设定,并集成过流、过压/欠压、过温等保护机制,保障设备在复杂环境下的可靠运行。
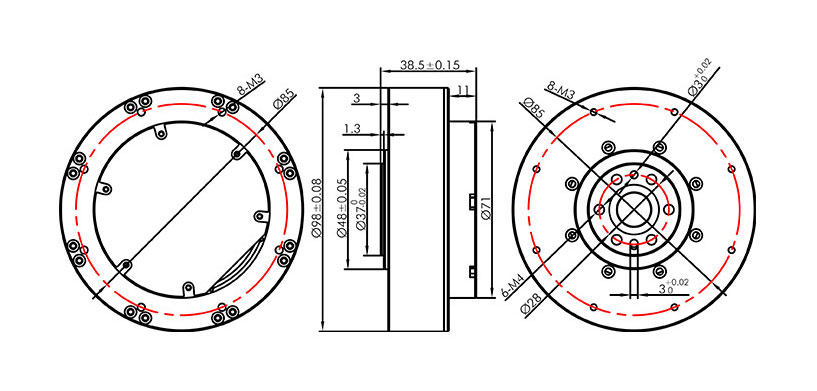
电机尺寸:Ф98*38.5mm
电机重量:485g
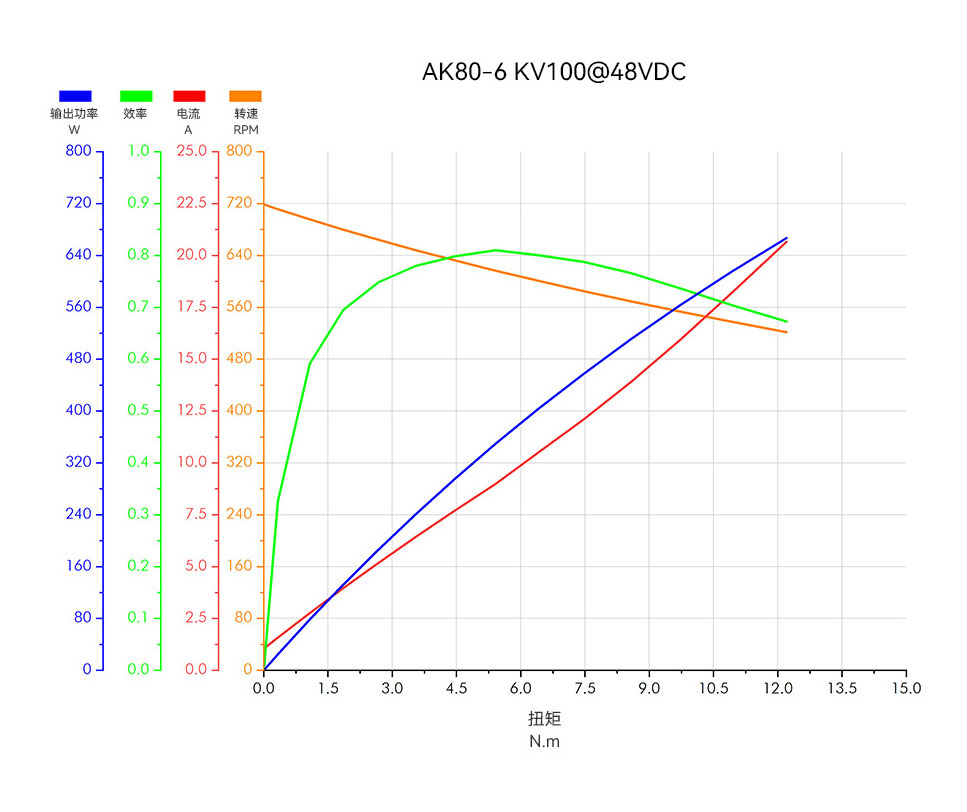
峰值扭矩:12Nm
空载转速:800rpm
高扭矩密度:在紧凑体积下提供 6 Nm 额定扭矩和 12 Nm 峰值扭矩,满足中等负载场景。
响应迅速:6:1 减速比兼顾速度与动态响应,支持多闭环控制模式。
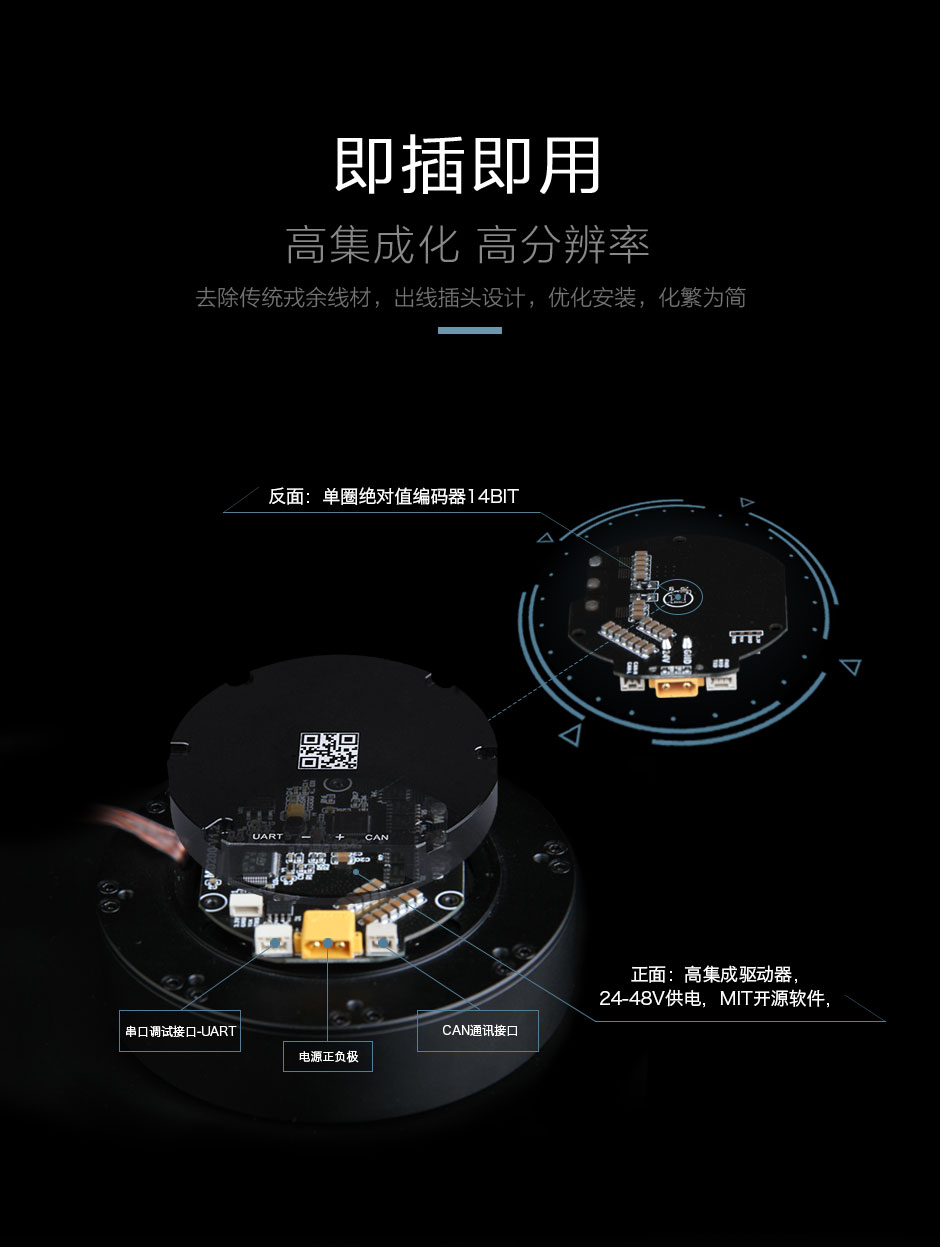
精准反馈:采用 14-bit 内环磁编码器,反馈精度高、定位稳定。
可靠保护机制:内置过流、过压/欠压、过温保护模块,提升系统长期稳定性。
轻巧耐用:485 g 机身重量适合用于外骨骼、四足机器人或关节驱动模块。
接口优化:插口式连接代替传统线束,减少连接故障风险;支持 CAN / UART 通信便于系统集成。
AK80-6 KV100 动力模组(标配含驱动板)*1
电源线*1
串口CAN线*1
合格证*1
R-link V2.0
驱动板V2.1
配线包V2.0
更多详细数据可联系在线顾问


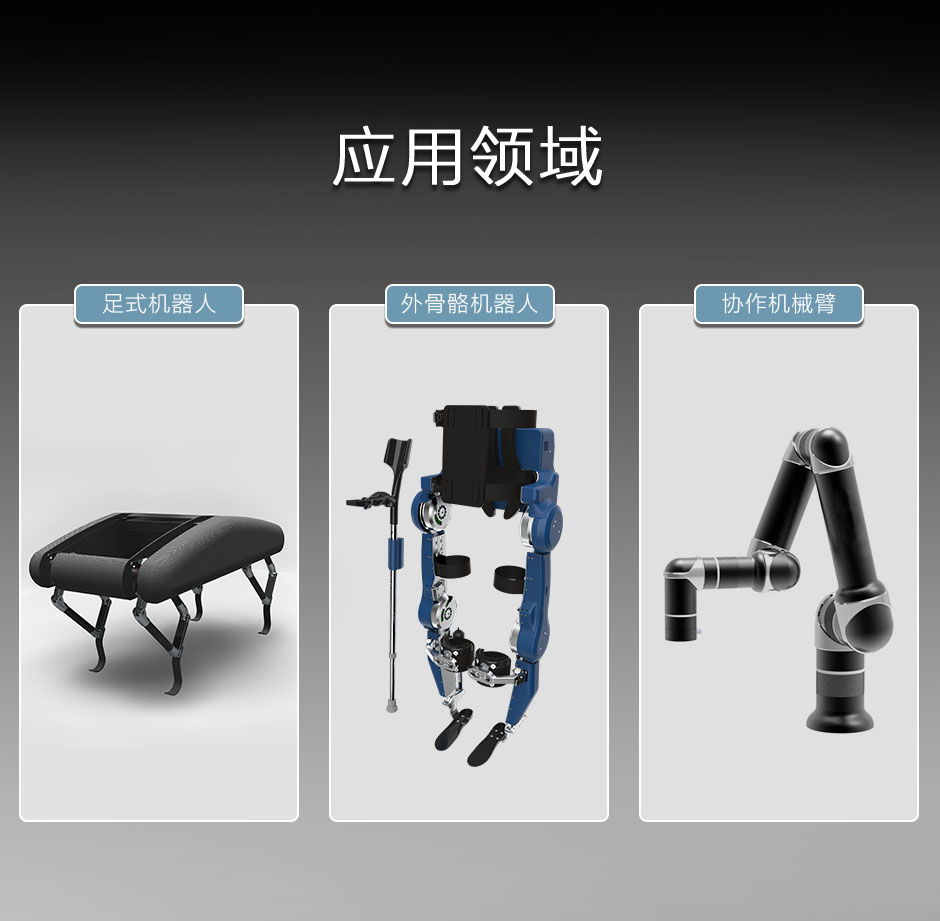
| 应用领域 | 足式机器人,外骨骼,AGV | 峰值扭矩 Nm | 12 |
| 驱动方式 | FOC | 峰值电流 ADC | 20 |
| 工作环境温度 | -20℃~50℃ | 速度常数 rpm/V | 100 |
| 线圈接法 | Delta | 扭矩常数 Nm/A | 0.105 |
| 绝缘等级 | H | 反电势常数 V/krpm | 10.5 |
| 绝缘耐压 | 1000V 5mA/2s | 线电阻 mΩ | 170 |
| 绝缘电阻 | 1000V10MΩ | 线电感 μH | 57 |
| 相数 | 3 | 转动惯量 gcm² | 607 |
| 极对数 | 21 | 电机常数 Nm/√W | 0.25 |
| 减速比 | 6:1 | 机电时间常数 ms | 0.94 |
| 反驱扭矩 Nm | 0.36 | 电气时间常数 ms | 0.34 |
| 背隙 ° | 0.22 | 重量 g | 485 |
| 温感 | None | 最大转矩密度 Nm/kg | 24 |
| 噪音dB距离电机65CM | 55 | CAN 接口对应 | A1257WR-S-4P |
| 基本额定动载荷 C N | 2760 | UART 接口对应 | A1257WR-S-3P |
| 基本额定静载荷 C0 N | 2810 | 电源接口对应 | XT30PW-M |
| 额定电压 V | 48 | 内环编码器类型 | 磁码 |
| 额定扭矩 Nm | 6 | 内环编码器分辨率 | 14bit |
| 额定转速 rpm | 603 | 外环编码器类型 | - |
| 额定电流 ADC | 9.7 | 外环编码器分辨率 | - |
| 编码器数量 | 1 |
| 分类 | 型号 | 额定电压V | 最大持续功率W | 额定扭矩Nm | 额定电流A | 额定转速RPM | 峰值扭矩Nm | 峰值电流A | 空载转速RPM | 减速比 | 重量G | 尺寸(直径*厚度)MM | 驱动板 | 编码器 | 操作 |
| AK系列机器人动力模组 | AK10-9 V3.0 KV60 | 48 | 442 | 18 | 10.7 | 235 | 53 | 31.9 | 320 | 9:1 | 940 | Ф98*61.7 | 有 | 双编 |  |
| AK系列机器人动力模组 | AK10-9 V2.0 KV60 | 24/48 | 430 | 18 | 10.6 | 109/228 | 48 | 29.8 | 160/320 | 9:1 | 960 | Ф98*61.7 | 有 | 双编 | |
| AK系列机器人动力模组 | AK10-9 V2.0 KV100 | 24/48 | 720 | 15 | 16.2 | 205/421 | 38 | 41.2 | 266/533 | 9:1 | 960 | Ф98*61.7 | 有 | 双编 | |
| AK系列机器人动力模组 | AK80-9 V3.0 KV100 | 48 | 368 | 9 | 12 | 390 | 22 | 28 | 570 | 9:1 | 490 | Ф98*38.5 | 有 | 单编 | |
| AK系列机器人动力模组 | AK80-8 KV60 | 48 | 230 | 10 | 6.9 | 243 | 25 | 21 | 360 | 8:1 | 570 | Ф98*43.9 | 有 | 双编 | |
| AK系列机器人动力模组 | AK80-6 KV100 | 48 | 340 | 6 | 9.7 | 603 | 12 | 20 | 800 | 6:1 | 485 | Ф98*38.5 | 有 | 单编 | |
| AK系列机器人动力模组 | AK80-64 KV80 | 24/48 | 220 | 48 | 7 | 23/48 | 120 | 19 | 37/75 | 64:1 | 850 | Ф98*61.9 | 有 | 单编 | |
| AK系列机器人动力模组 | AK70-10 KV100 | 24/48 | 230 | 8.3 | 7.2 | 148/310 | 24.8 | 23.2 | 240/480 | 10:1 | 521 | Ф89*50.25 | 有 | 单编 | |
| AK系列机器人动力模组 | AK70-9 V3.0 KV60 | 48 | 231 | 8.5 | 6.25 | 260 | 29.2 | 23.8 | 320 | 9:1 | 540 | Ф89*49 | 有 | 双编 | |
| AKH系列中空行星模组 | AKH70-48 V1.0 KV41 | 48 | 217 | 74 | 6 | 28 | 222 | 21 | 35 | 48:1 | 1396 | φ90*81.5 | 有 | 双编 | |
| AK系列机器人动力模组 | AK70-9 KV60 | 48 | 230 | 8.5 | 6.25 | 260 | 29.2 | 23.8 | 320 | 9:1 | 540 | Ф89*46 | 有 | 双编 | |
| AK系列机器人动力模组 | AK60-6 V3.0 KV80 | 24/48 | 74 | 3 | 3.8 | 233/490 | 9 | 10.3/11.2 | 320/640 | 6:1 | 380 | Ф79*43 | 有 | 单编 | |
| AK系列机器人动力模组 | AK60-39 V3.0 KV80 | 48 | 176 | 24 | 4.5 | 70 | 72 | 17 | 98 | 39:1 | 750 | Ф79*67 | 有 | 双编 | |
| AK系列机器人动力模组 | AK60-6 V1.1 KV140 | 24 | 130 | 3 | 6.5 | 420 | 9 | 22.7 | 560 | 6:1 | 368 | Ф79*39.5 | 有 | 单编 | |
| AK系列机器人动力模组 | AK60-6 V1.1 KV80 | 24 | 74 | 3 | 3.8 | 233 | 9 | 13.1 | 320 | 6:1 | 368 | Ф79*39.5 | 有 | 单编 | |
| AK系列机器人动力模组 | AK45-36 KV80 | 24 | 33 | 8 | 2 | 40 | 24 | 6.5 | 52 | 36:1 | 340 | φ55*54 | 有 | 单编 | |
| AK系列机器人动力模组 | AK45-10 KV75 | 24 | 39 | 2.5 | 2.1 | 150 | 7 | 5 | 180 | 10:1 | 260 | Ф53*43 | 有 | 单编 | |
| AK系列机器人动力模组 | AK40-10 KV170 | 24 | 59 | 1.3 | 2.7 | 370 | 4.1 | 7.3 | 435 | 10:1 | 185 | φ53*37 | 有 | 单编 | |
| AKE系列准直驱电机 | AKE90-8 KV35 | 48 | 700 | 55 | 21 | 120 | 170 | 72 | 210 | 8:1 | 1400 | Ф107.5*43.5 | 无 | |
|
| AKE系列准直驱电机 | AKE80-8 KV30 | 48 | 188 | 12 | 4.8 | 150 | 30 | 12 | 195 | 8:1 | 570 | Ф87*32 | 无 | |
|
| AKE系列准直驱电机 | AKE60-8 KV80 | 24 | 95 | 5 | 4.8 | 180 | 12.5 | 12 | 240 | 8:1 | 260 | Ф69*25 | 无 | |
|
| AKA系列机器人动力模组 | AKA10-9 KV60 | 48 | 205 | 18 | 10.6 | 109 | 53 | 32 | 320 | 9:1 | 1060 | ∅100*70 | 有 | 单编 | |
| AKA系列机器人动力模组 | AKA60-6 KV80 | 24/48 | 62 | 3 | 4 | 200/400 | 9 | 11.2 | 320/640 | 6∶1 | 460 | Ф80*51.2 | 有 | 单编 | |
| AKH系列中空行星模组 | AKH70-16 V1.0 KV41 | 48 | 245 | 26 | 6.5 | 90 | 85 | 23 | 105 | 16:1 | 879 | φ90*60.5 | 有 | 双编 | |
 大驱动板 AK60 -4820-1C-A2 驱动器安装说明 (PDF)
大驱动板 AK60 -4820-1C-A2 驱动器安装说明 (PDF) 





