ユーザー登録

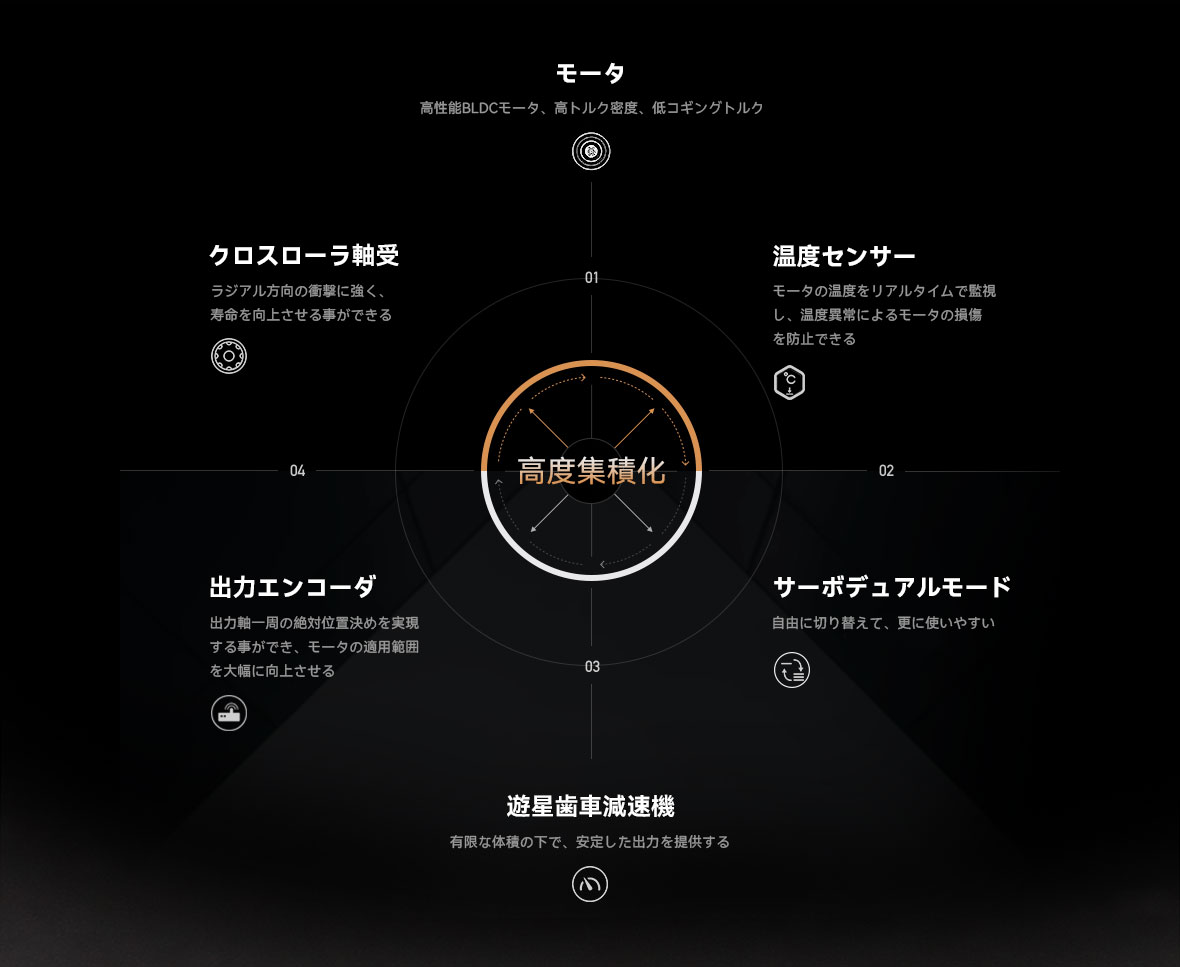
CubeMars AK10-9 V2.0 KV60ロボットアクチュエータは、ブラシレスDCモーター、独自の遊星歯車箱、ドライバーボードをコンパクトで取り付けの容易なユニットに統合しています。9:1の遊星減速機構を搭載。応答速度と出力トルク性能のバランスを実現しています。モジュールはサーボ制御と力制御の2つの制御モードをサポート。プラグインコネクタと自動PIDパラメータ同定機能を備えています。過電流、過電圧/低電圧、過熱に対する内蔵保護機能を搭載。複雑な環境での安全かつ信頼性の高い動作を実現します。
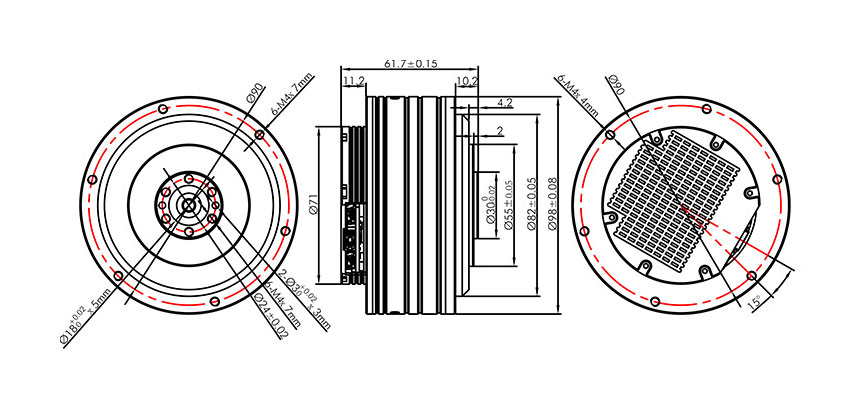
モーター寸法: Ф98*61.7mm
モーター重量: 960g
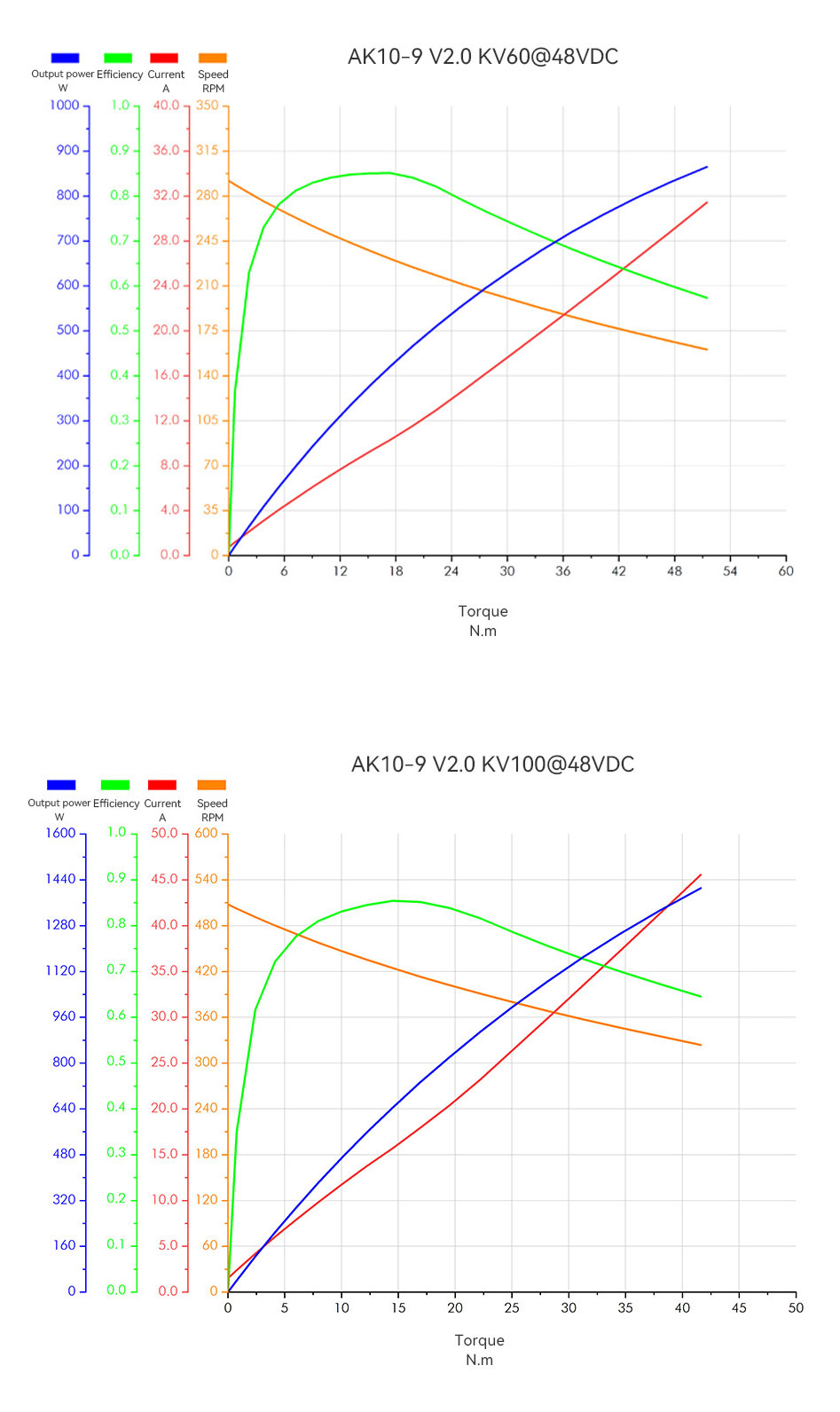
ピークトルク: 48Nm
無負荷速度: 320rpm
完全統合設計: モーター、ギアボックス、ドライバー、エンコーダを単一ユニットに統合。配線と設置を大幅に簡素化します。
優れたトルク密度: 48Nmのピークトルク / 0.96kgの重量。約50Nm/kgの最大トルク密度を実現しています。
デュアル制御モード対応: サーボ制御モードと力制御モードの両方に対応。より幅広いアプリケーションに適しています。
自動チューニング機能: 適応型PIDパラメータ同定機能を搭載。コミッショニング時間を短縮します。
総合的な保護機能: 過電流、過電圧/低電圧、過温保護を内蔵。信頼性を向上させます。
プラグイン接続設計: モジュールと外部コントローラー間の接続を簡素化。組立効率を向上させます。
幅広い応用範囲: 脚式ロボット、外骨格システム、AGV、関節モジュールに推奨されます。
AK10-9 V2.0 KV60アクチュエータ (標準構成にはドライバーボード(Driver Board)が含まれます)x1
電源ケーブル x1
シリアルCANケーブル x1
適合証明書 x1
R-link V2.0
配線パッケージV2.0


| 応用分野 | 足型ロボット、外骨格、AGV | ピークトルクNm | 48 |
| ドライブモード | FOC | ピーク電流ADC | 29.8 |
| 動作環境温度 | -20℃~50℃ | 速度定数rpm/V | 60 |
| コイル接合方法 | star | トルク定数Nm/A | 0.198 |
| 絶縁レベル | C | 逆電位定数V/krpm | 17.2 |
| 絶縁耐圧 | 1000V 5mA/2s | 線抵抗m Ω | 195 |
| 絶縁抵抗 | 1000V 10MΩ | 線インダクタンスμ H | 181 |
| 相数 | 3 | 慣性モーメントgcm² | 1002 |
| 極対数 | 21 | モータ定数Nm/√W | 0.45 |
| 減速比 | 9:1 | 機械的時定数 ms | 0.5 |
| バックドライブトルクNm | 0.8 | 電気的時定数 ms | 0.93 |
| バックラッシュ度 | 0.33 | 重量 g | 960 |
| 温感 | NTC MF51B 103F3950 | 最大トルク密度 Nm/kg | 50 |
| ノイズdBレンジモータ65CM | 65 | CANインタフェース対応 | A1257WR-S-4P |
| 基本定格動荷重C N | 2000 | UARTインタフェース対応 | A1257WR-S-3P |
| 基本定格静荷重C0 N | 2520 | 電源コネクタ対応 | XT30PW-M |
| 定格電圧 V | 24/48 | 内輪エンコーダタイプ | 磁束です |
| 定格トルクNm | 18 | 内輪リングエンコーダの分解能 | 14bit |
| 定格回転速度rpm | 109/228 | 外輪リングエンコーダタイプ | 磁束です |
| 定格電流ADC | 10.6 | 外輪エンコーダ解像度 | 15bit |
| エンコーダの数 | 2 |