ユーザー登録

近年、ロボティックエクソスケルトンとウェアラブルデバイスは急速に成長し、リハビリテーションや移動アシスタンスにおいて不可欠なツールとなっています。膝のリハビリテーションでは、エクソスケルトンが積極的なサポートと拡張機能を提供し、患者の回復効率を向上させると同時に、理学療法士の負担を軽減します。
ハリーファ大学の研究チームは、従来のシステムが提供する剛性範囲が狭かったり、反応が遅いといった限界を解決するため、調整可能な剛性を持つ新しい膝エクソスケルトンを開発しました。この新しいデザインは、歩行サイクル全体でリアルタイムで剛性を調整し、人間の膝の自然な剛性変動を正確に再現します。
研究によると、通常の歩行中、膝関節は約10°~105°の可動範囲を必要とし、平地では約40 N·mから階段を下るときには100 N·mを超えるトルクが求められます。膝の剛性自体は歩行サイクル全体で大きく変動し、初期立脚期では450 N·m/radもあれば、支持相の終わりでは約30 N·m/radとなります。ハリーファ大学のデザインは、これらの生体力学的要件を成功裏に満たし、30~450 N·m/radの最適な剛性範囲を提供します。
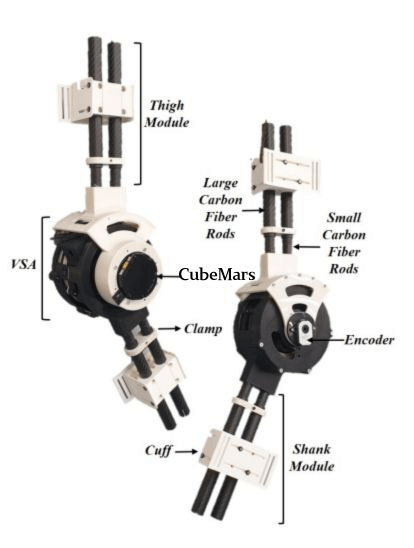
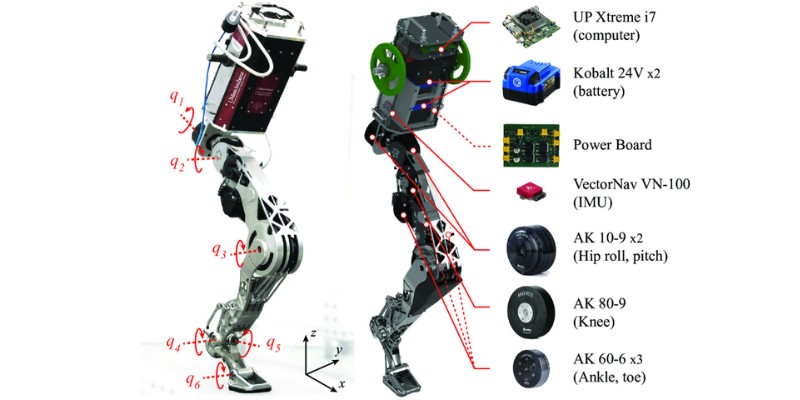
この性能を実現するため、システムは外部の高トルクアクチュエーターとしてCubeMars AK80-64 KV80エクソスケルトンモーターを組み込み、可変剛性アクチュエーター(VSA)を駆動します。AK80-64は自然な膝の動作を再現するために必要な精度とパワーを提供しました:
高トルク密度 – 強力な出力を持つコンパクトサイズで、下肢エクソスケルトンに理想的です。
正確な制御 – 歩行サイクルの開始時に迅速な剛性移行を可能にし、スイングフェーズ中の滑らかな調整を実現します。
エネルギー効率 – リハビリテーションセッション中の稼働時間を延長し、消費電力を削減します。
スムーズな統合 – モジュール設計によりロボティックエクソスケルトンシステムへの統合が容易です。
プロダクト | サイズ | 重量 | 定格RPM | 定格トルク | ピークトルク | 最大トルク密度 |
AK80-64 KV80 | 98×62 mm | 850 g | 48 rpm | 48 Nm | 120 Nm | 141.2 Nm/kg |

実験的検証と結果
テストにより、プロトタイプが人間の生物力学と一致するように剛性を動的に調整し、1.0〜1.5m/sの歩行速度で膝の剛性変化を正確に追跡できることが確認されました。以前のデザインと比較して、反応速度が著しく改善され、安全で自然で効率的な歩行リハビリテーションが可能です。
この共同研究は、臨床リハビリテーションにおける可変剛性膝関節エクソスケルトンの可能性と、最先端ロボティクス分野における CubeMars アクチュエータの信頼性の双方を示しています。 実証された高性能を背景に、CubeMars AK80-64 ロボティックアクチュエータは、リハビリテーションロボット、ウェアラブルエクソスケルトン、人間―ロボット相互作用システムにおける研究および産業用途を引き続き支えています。